 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSolving QUBO on the Loihi 2 Neuromorphic Processor
Aug 06, 2024In this article, we describe an algorithm for solving Quadratic Unconstrained Binary Optimization problems on the Intel Loihi 2 neuromorphic processor. The solver is based on a hardware-aware fine-grained parallel simulated annealing algorithm developed for Intel's neuromorphic research chip Loihi 2. Preliminary results show that our approach can generate feasible solutions in as little as 1 ms and up to 37x more energy efficient compared to two baseline solvers running on a CPU. These advantages could be especially relevant for size-, weight-, and power-constrained edge computing applications.
Neuromorphic quadratic programming for efficient and scalable model predictive control
Jan 26, 2024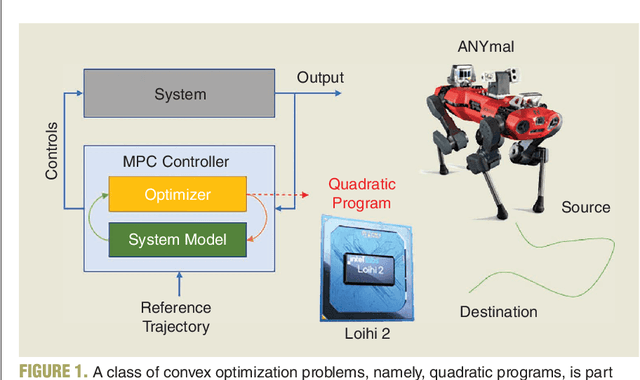
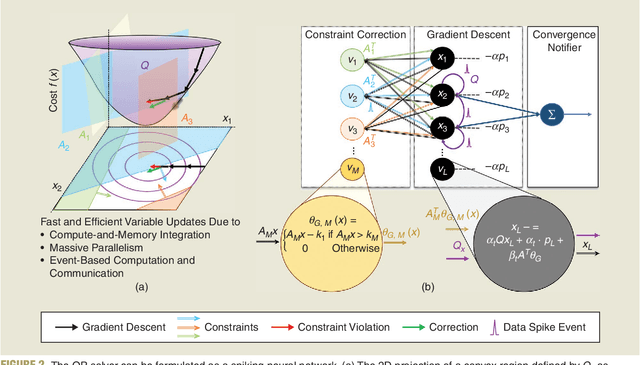
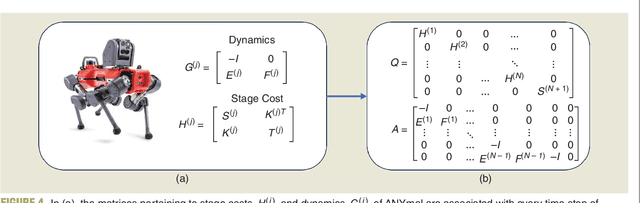
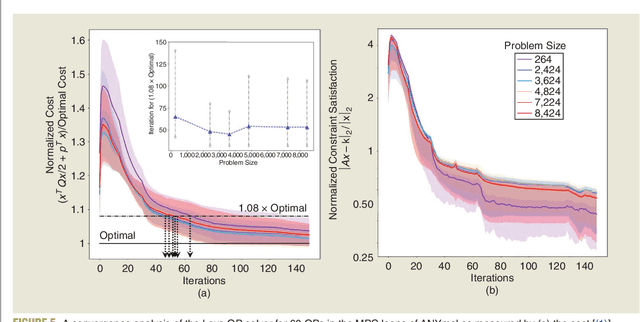
Applications in robotics or other size-, weight- and power-constrained autonomous systems at the edge often require real-time and low-energy solutions to large optimization problems. Event-based and memory-integrated neuromorphic architectures promise to solve such optimization problems with superior energy efficiency and performance compared to conventional von Neumann architectures. Here, we present a method to solve convex continuous optimization problems with quadratic cost functions and linear constraints on Intel's scalable neuromorphic research chip Loihi 2. When applied to model predictive control (MPC) problems for the quadruped robotic platform ANYmal, this method achieves over two orders of magnitude reduction in combined energy-delay product compared to the state-of-the-art solver, OSQP, on (edge) CPUs and GPUs with solution times under ten milliseconds for various problem sizes. These results demonstrate the benefit of non-von-Neumann architectures for robotic control applications.