 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREMODEL-LLM: Transforming C code to Java using LLMs
Dec 12, 2025The automated translation of C code to Java code is a notoriously difficult task, fraught with challenges stemming from fundamental paradigm shifts (procedural vs. Object Oriented), memory models (manual pointers vs. Garbage Collection), and incompatible data types. This paper investigates the efficacy of 19 small, quantized LLMs (under 20 billion parameters) for the C to Java translation task. We use a novel, hybrid pipeline that leverages Abstract Syntax Trees (ASTs) for semantic decomposition and employs a highly constrained, rule based prompting strategy. The results are stark: a clear multi tiered performance divide emerged. The vast majority of models (Tier 3, e.g., llama3.1, gemma3, starcoder2) failed 100\% of the tests, proving incapable of generating even basic, runnable Java boilerplate. A small middle tier (Tier 2, e.g., mistral-nemo and mistral) produced runnable code but was plagued by dangerous semantic failures and wrong translations. Only three models (Tier 1: phi4, deepseek-coder-v2, codeqwen) proved viable, passing over 50\% of the test suite. Even these top models failed on the most complex C concepts, such as function pointers, sizeof, and enum logic, revealing a hard ceiling for the reasoning capabilities of current quantized models.
E-ARMOR: Edge case Assessment and Review of Multilingual Optical Character Recognition
Sep 03, 2025Optical Character Recognition (OCR) in multilingual, noisy, and diverse real-world images remains a significant challenge for optical character recognition systems. With the rise of Large Vision-Language Models (LVLMs), there is growing interest in their ability to generalize and reason beyond fixed OCR pipelines. In this work, we introduce Sprinklr-Edge-OCR, a novel OCR system built specifically optimized for edge deployment in resource-constrained environments. We present a large-scale comparative evaluation of five state-of-the-art LVLMs (InternVL, Qwen, GOT OCR, LLaMA, MiniCPM) and two traditional OCR systems (Sprinklr-Edge-OCR, SuryaOCR) on a proprietary, doubly hand annotated dataset of multilingual (54 languages) images. Our benchmark covers a broad range of metrics including accuracy, semantic consistency, language coverage, computational efficiency (latency, memory, GPU usage), and deployment cost. To better reflect real-world applicability, we also conducted edge case deployment analysis, evaluating model performance on CPU only environments. Among the results, Qwen achieved the highest precision (0.54), while Sprinklr-Edge-OCR delivered the best overall F1 score (0.46) and outperformed others in efficiency, processing images 35 faster (0.17 seconds per image on average) and at less than 0.01 of the cost (0.006 USD per 1,000 images) compared to LVLM. Our findings demonstrate that the most optimal OCR systems for edge deployment are the traditional ones even in the era of LLMs due to their low compute requirements, low latency, and very high affordability.
Towards Formal Verification of LLM-Generated Code from Natural Language Prompts
Jul 17, 2025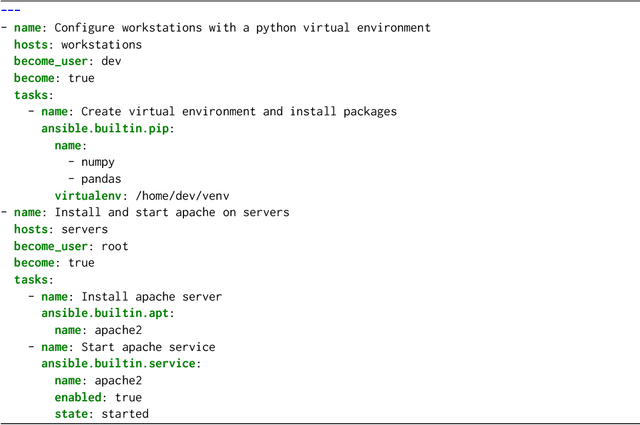
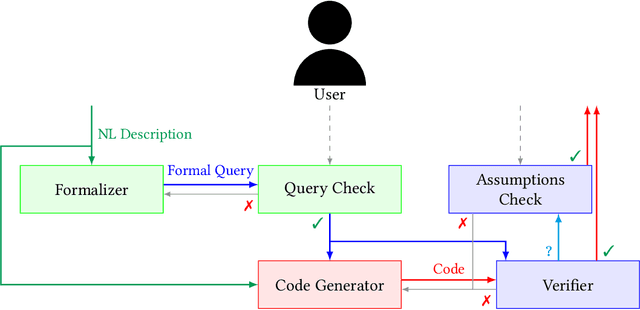
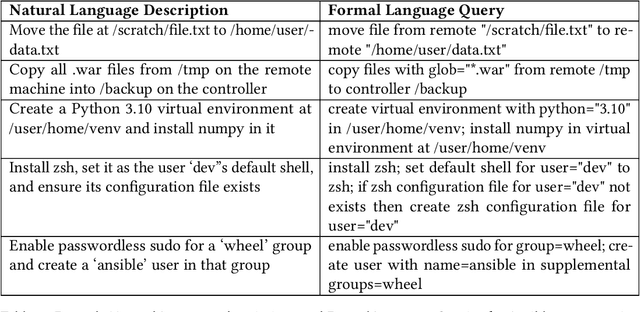
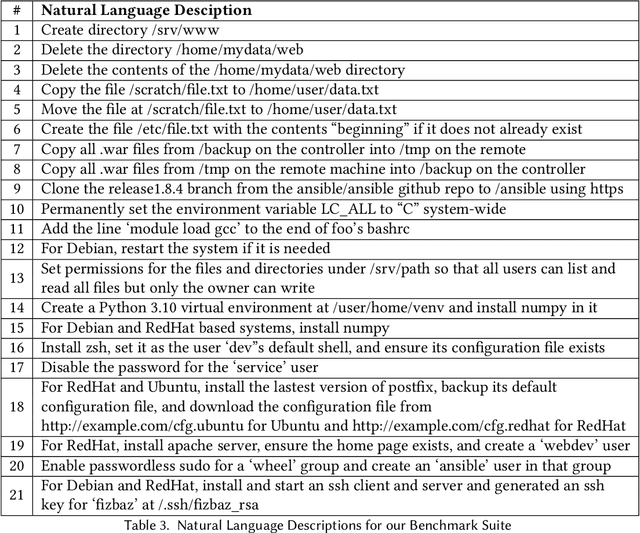
In the past few years LLMs have emerged as a tool that can aid programmers by taking natural language descriptions and generating code based on it. However, LLMs often generate incorrect code that users need to fix and the literature suggests users often struggle to detect these errors. In this work we seek to offer formal guarantees of correctness to LLM generated code; such guarantees could improve the experience of using AI Code Assistants and potentially enable natural language programming for users with little or no programming knowledge. To address this challenge we propose to incorporate a formal query language that can represent a user's intent in a formally defined but natural language-like manner that a user can confirm matches their intent. Then, using such a query we propose to verify LLM generated code to ensure it matches the user's intent. We implement these ideas in our system, Astrogator, for the Ansible programming language which includes such a formal query language, a calculus for representing the behavior of Ansible programs, and a symbolic interpreter which is used for the verification. On a benchmark suite of 21 code-generation tasks, our verifier is able to verify correct code in 83% of cases and identify incorrect code in 92%.
[Re] Double Sampling Randomized Smoothing
Jun 27, 2023This paper is a contribution to the reproducibility challenge in the field of machine learning, specifically addressing the issue of certifying the robustness of neural networks (NNs) against adversarial perturbations. The proposed Double Sampling Randomized Smoothing (DSRS) framework overcomes the limitations of existing methods by using an additional smoothing distribution to improve the robustness certification. The paper provides a clear manifestation of DSRS for a generalized family of Gaussian smoothing and a computationally efficient method for implementation. The experiments on MNIST and CIFAR-10 demonstrate the effectiveness of DSRS, consistently certifying larger robust radii compared to other methods. Also various ablations studies are conducted to further analyze the hyperparameters and effect of adversarial training methods on the certified radius by the proposed framework.
HeRoSwarm: Fully-Capable Miniature Swarm Robot Hardware Design With Open-Source ROS Support
Nov 06, 2022



Experiments using large numbers of miniature swarm robots are desirable to teach, study, and test multi-robot and swarm intelligence algorithms and their applications. To realize the full potential of a swarm robot, it should be capable of not only motion but also sensing, computing, communication, and power management modules with multiple options. Current swarm robot platforms developed for commercial and academic research purposes lack several of these critical attributes by focusing only on a few of these aspects. Therefore, in this paper, we propose the HeRoSwarm, a fully-capable swarm robot platform with open-source hardware and software support. The proposed robot hardware is a low-cost design with commercial off-the-shelf components that uniquely integrates multiple sensing, communication, and computing modalities with various power management capabilities into a tiny footprint. Moreover, our swarm robot with odometry capability with Robot Operating Systems (ROS) support is unique in its kind. This simple yet powerful swarm robot design has been extensively verified with different prototyping variants and multi-robot experimental demonstrations.