 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndustrial Segment Anything -- a Case Study in Aircraft Manufacturing, Intralogistics, Maintenance, Repair, and Overhaul
Jul 24, 2023Deploying deep learning-based applications in specialized domains like the aircraft production industry typically suffers from the training data availability problem. Only a few datasets represent non-everyday objects, situations, and tasks. Recent advantages in research around Vision Foundation Models (VFM) opened a new area of tasks and models with high generalization capabilities in non-semantic and semantic predictions. As recently demonstrated by the Segment Anything Project, exploiting VFM's zero-shot capabilities is a promising direction in tackling the boundaries spanned by data, context, and sensor variety. Although, investigating its application within specific domains is subject to ongoing research. This paper contributes here by surveying applications of the SAM in aircraft production-specific use cases. We include manufacturing, intralogistics, as well as maintenance, repair, and overhaul processes, also representing a variety of other neighboring industrial domains. Besides presenting the various use cases, we further discuss the injection of domain knowledge.
Proxying ROS communications -- enabling containerized ROS deployments in distributed multi-host environments
Jan 05, 2022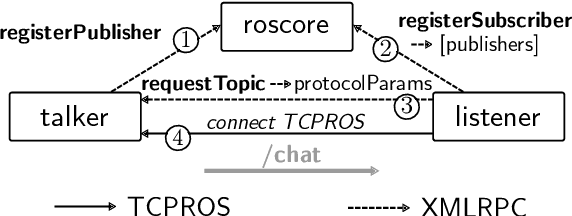
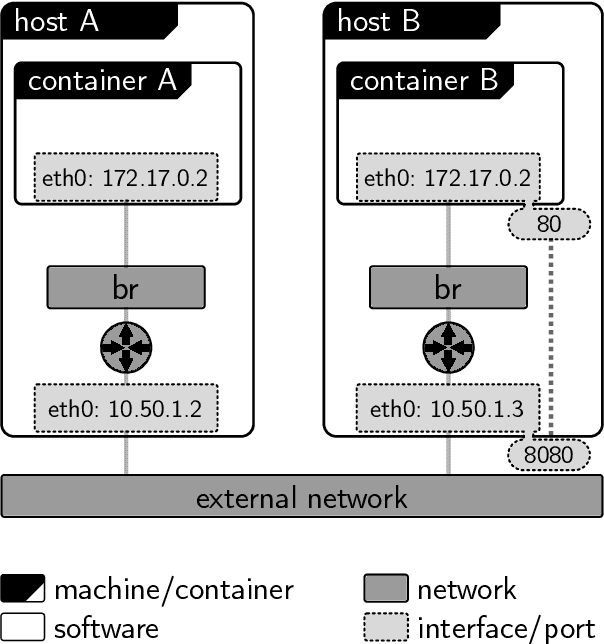
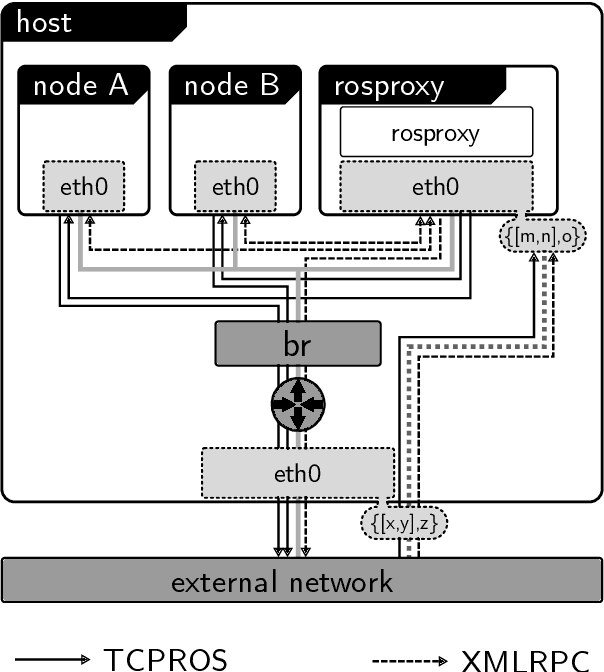
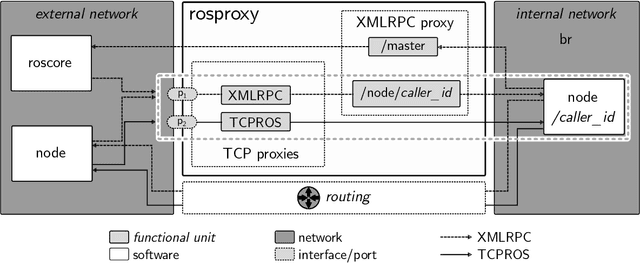
With the ability to use containers at the edge, they pose a unified solution to combat the complexity of distributed multi-host ROS deployments, as well as individual ROS-node and dependency deployment. The bidirectional communication in ROS poses a challenge to using containerized ROS deployments alongside non-containerized ones spread over multiple machines though. We will analyze the communication protocol employed by ROS, and the suitability of different container networking modes and their implications on ROS deployments. Finally, we will present a layer 7 transparent proxy server architecture for ROS, as a solution to the identified problems. Enabling the use of ROS not only in containerized environments, but proxying ROS between network segments in general.
Semantically enriched spatial modelling of industrial indoor environments enabling location-based services
Dec 22, 2021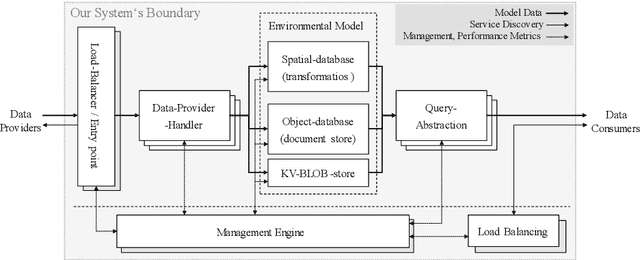
This paper presents a concept for a software system called RAIL representing industrial indoor environments in a dynamic spatial model, aimed at easing development and provision of location-based services. RAIL integrates data from different sensor modalities and additional contextual information through a unified interface. Approaches to environmental modelling from other domains are reviewed and analyzed for their suitability regarding the requirements for our target domains; intralogistics and production. Subsequently a novel way of modelling data representing indoor space, and an architecture for the software system are proposed.
* 3. Kongresses Montage Handhabung Industrieroboter MHI
A Solution to the Generalized ROS Hardware IO Problem -- A Generic Modbus/TCP Device Driver for PLCs, Sensors and Actuators
Dec 21, 2021



The Robot Operating System (ROS) provides a software framework, and ecosystem of knowledge and community supplied resources to rapidly develop and prototype intelligent robotics applications. By standardizing communication, configuration and invocation of software modules, ROS facilitates reuse of device-driver and algorithm implementations. Using existing implementations of functionality allows users to assemble their robotics application from tested and known-good capabilities. Despite the efforts of the ROS-Industrial consortium and projects like ROSIN to bring ROS to industrial applications and integrate industrial hardware, we observe a lack of options to generically integrate basic physical IO. In this work we lay out and provide a solution to this problem by implementing a generic Modbus/TCP device driver for ROS.