 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Rigid Body Assembly via Contact-Implicit Optimal Control with Exact Second-Order Derivatives
Jan 30, 2026Efficient planning of assembly motions is a long standing challenge in the field of robotics that has been primarily tackled with reinforcement learning and sampling-based methods by using extensive physics simulations. This paper proposes a sample-efficient robust optimal control approach for the determination of assembly motions, which requires significantly less physics simulation steps during planning through the efficient use of derivative information. To this end, a differentiable physics simulation is constructed that provides second-order analytic derivatives to the numerical solver and allows one to traverse seamlessly from informative derivatives to accurate contact simulation. The solution of the physics simulation problem is made differentiable by using smoothing inspired by interior-point methods applied to both the collision detection as well as the contact resolution problem. We propose a modified variant of an optimization-based formulation of collision detection formulated as a linear program and present an efficient implementation for the nominal evaluation and corresponding first- and second-order derivatives. Moreover, a multi-scenario-based trajectory optimization problem that ensures robustness with respect to sim-to-real mismatches is derived. The capability of the considered formulation is illustrated by results where over 99\% successful executions are achieved in real-world experiments. Thereby, we carefully investigate the effect of smooth approximations of the contact dynamics and robust modeling on the success rates. Furthermore, the method's capability is tested on different peg-in-hole problems in simulation to show the benefit of using exact Hessians over commonly used Hessian approximations.
Frenet-Cartesian Model Representations for Automotive Obstacle Avoidance within Nonlinear MPC
Dec 22, 2022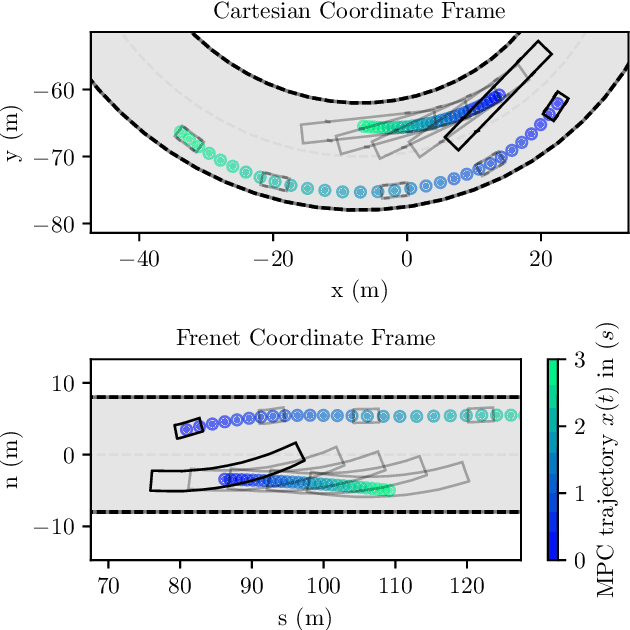

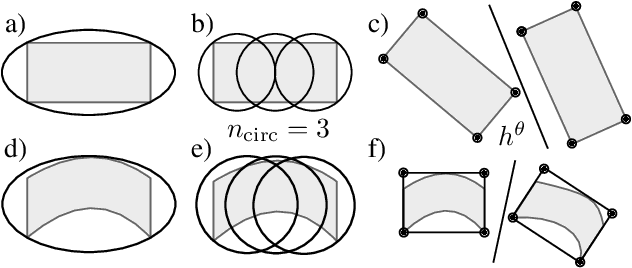
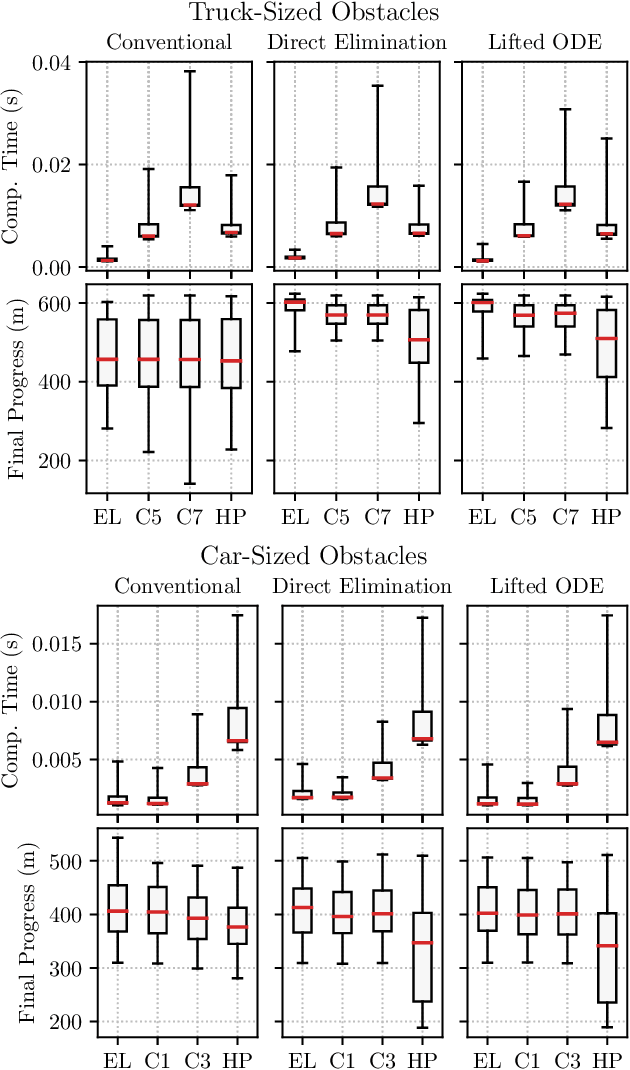
In recent years, nonlinear model predictive control (NMPC) has been extensively used for solving automotive motion control and planning tasks. In order to formulate the NMPC problem, different coordinate systems can be used with different advantages. We propose and compare formulations for the NMPC related optimization problem, involving a Cartesian and a Frenet coordinate frame (CCF/ FCF) in a single nonlinear program (NLP). We specify costs and collision avoidance constraints in the more advantageous coordinate frame, derive appropriate formulations and compare different obstacle constraints. With this approach, we exploit the simpler formulation of opponent vehicle constraints in the CCF, as well as road aligned costs and constraints related to the FCF. Comparisons to other approaches in a simulation framework highlight the advantages of the proposed approaches.