 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime-Ordered Ad-hoc Resource Sharing for Independent Robotic Agents
Aug 15, 2024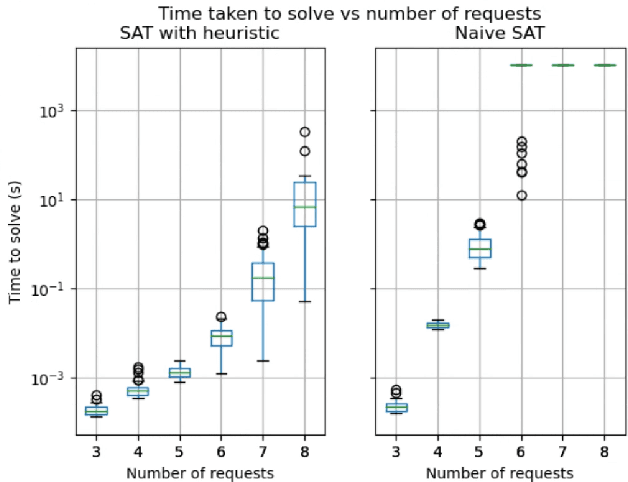


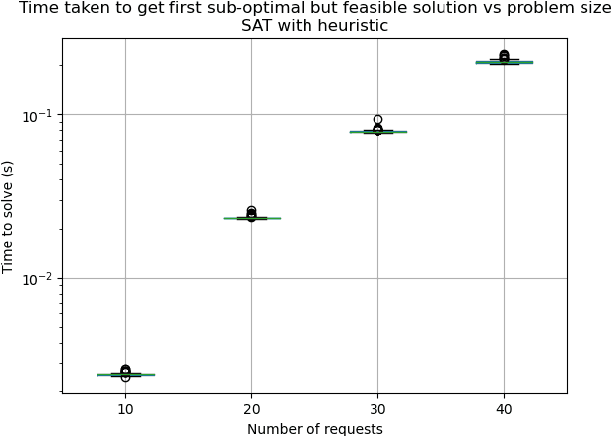
Resource sharing is a crucial part of a multi-robot system. We propose a Boolean satisfiability based approach to resource sharing. Our key contributions are an algorithm for converting any constrained assignment to a weighted-SAT based optimization. We propose a theorem that allows optimal resource assignment problems to be solved via repeated application of a SAT solver. Additionally we show a way to encode continuous time ordering constraints using Conjunctive Normal Form (CNF). We benchmark our new algorithms and show that they can be used in an ad-hoc setting. We test our algorithms on a fleet of simulated and real world robots and show that the algorithms are able to handle real world situations. Our algorithms and test harnesses are opensource and build on Open-RMFs fleet management system.
From Concept to Field Tests: Accelerated Development of Multi-AUV Missions Using a High-Fidelity Faster-than-Real-Time Simulator
Nov 17, 2023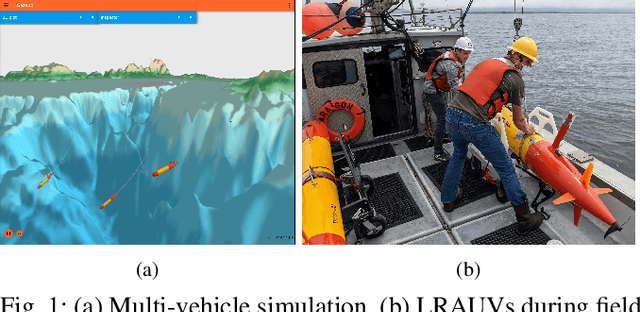
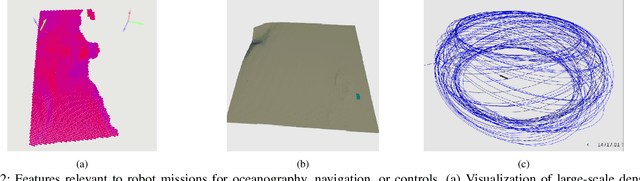
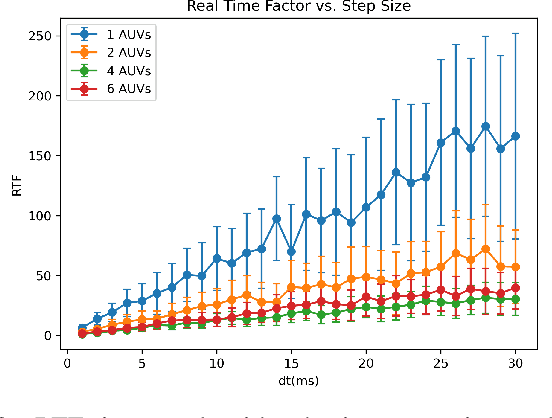
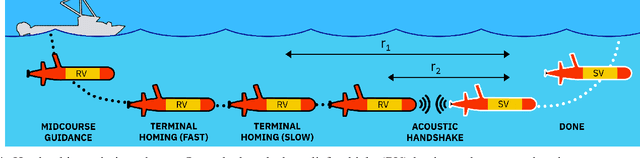
We designed and validated a novel simulator for efficient development of multi-robot marine missions. To accelerate development of cooperative behaviors, the simulator models the robots' operating conditions with moderately high fidelity and runs significantly faster than real time, including acoustic communications, dynamic environmental data, and high-resolution bathymetry in large worlds. The simulator's ability to exceed a real-time factor (RTF) of 100 has been stress-tested with a robust continuous integration suite and was used to develop a multi-robot field experiment.