Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Concept to Field Tests: Accelerated Development of Multi-AUV Missions Using a High-Fidelity Faster-than-Real-Time Simulator
Nov 17, 2023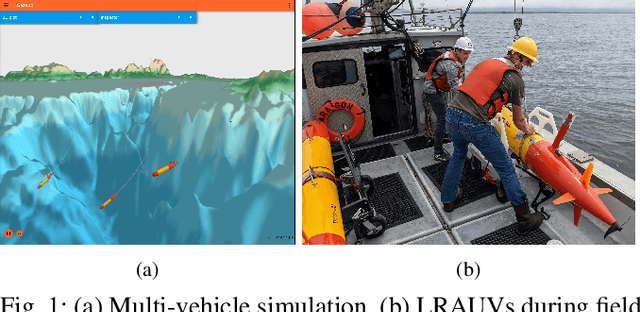
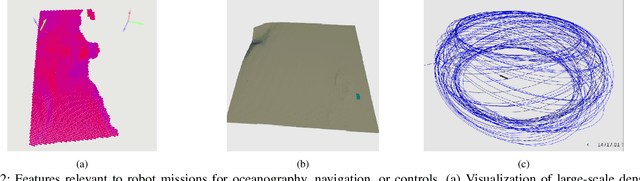
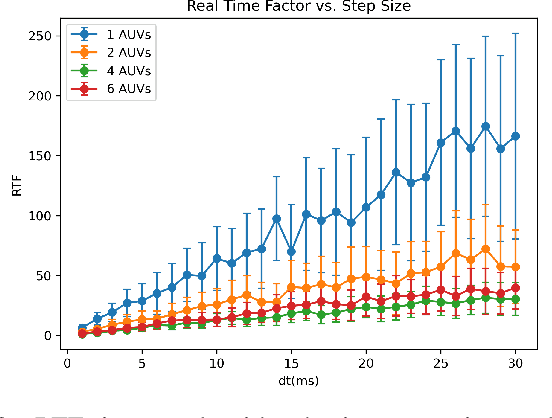
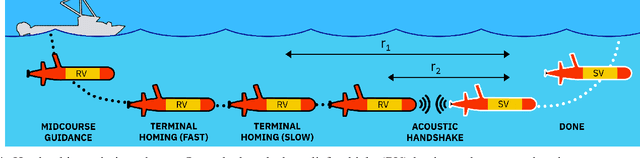
We designed and validated a novel simulator for efficient development of multi-robot marine missions. To accelerate development of cooperative behaviors, the simulator models the robots' operating conditions with moderately high fidelity and runs significantly faster than real time, including acoustic communications, dynamic environmental data, and high-resolution bathymetry in large worlds. The simulator's ability to exceed a real-time factor (RTF) of 100 has been stress-tested with a robust continuous integration suite and was used to develop a multi-robot field experiment.
* IEEE International Conference on Robotics and Automation (ICRA),
London, United Kingdom, 2023, pp. 3102-3108
Via