 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuaternion variational integration for inertial maneuvering in a biomimetic UAV
Jun 25, 2022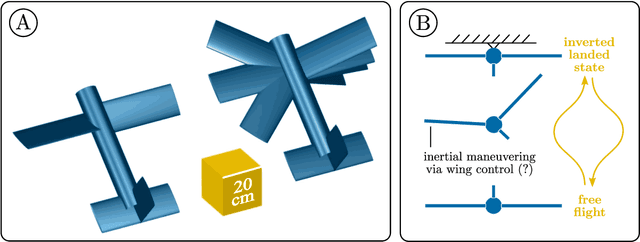
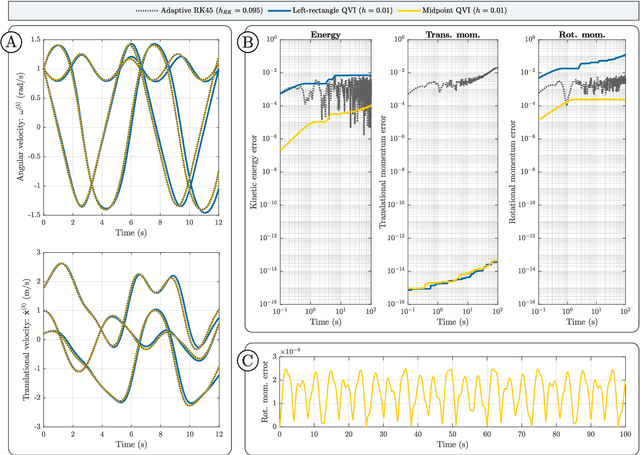
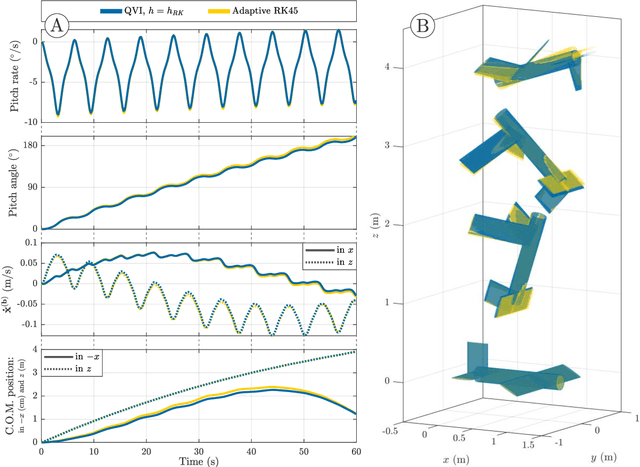
Biological flying, gliding, and falling creatures are capable of extraordinary forms of inertial maneuvering: free-space maneuvering based on fine control of their multibody dynamics, as typified by the self-righting reflexes of cats. However, designing inertial maneuvering capability into biomimetic robots, such as biomimetic unmanned aerial vehicles (UAVs) is challenging. Accurately simulating this maneuvering requires numerical integrators that can ensure both singularity-free integration, and momentum and energy conservation, in a strongly coupled system - properties unavailable in existing conventional integrators. In this work, we develop a pair of novel quaternion variational integrators (QVI) showing these properties, and demonstrate their capability for simulating inertial maneuvering in a biomimetic UAV showing complex multibody-dynamics coupling. Being quaternion-valued, these QVIs are innately singularity-free; and being variational, they can show excellent energy and momentum conservation properties. We explore the effect of variational integration order (left-rectangle vs. midpoint) on the conservation properties of integrator, and conclude that, in complex coupled systems in which canonical momenta may be time-varying, the midpoint integrator is required. The resulting midpoint QVI is well-suited to the analysis of inertial maneuvering in a biomimetic UAV - a feature that we demonstrate in simulation - and of other complex dynamical systems.
Pitch-axis supermanoeuvrability in a biomimetic morphing-wing aircraft
May 19, 2022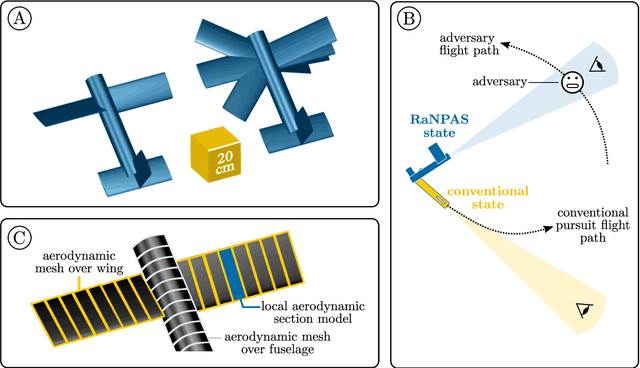
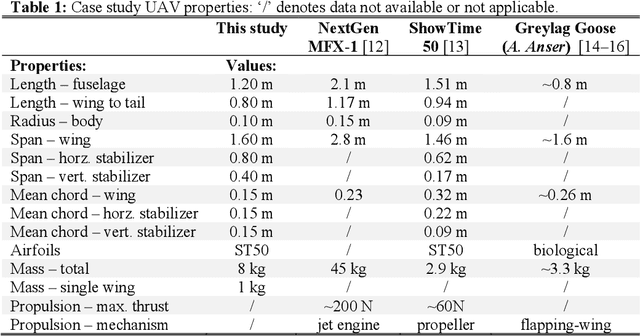
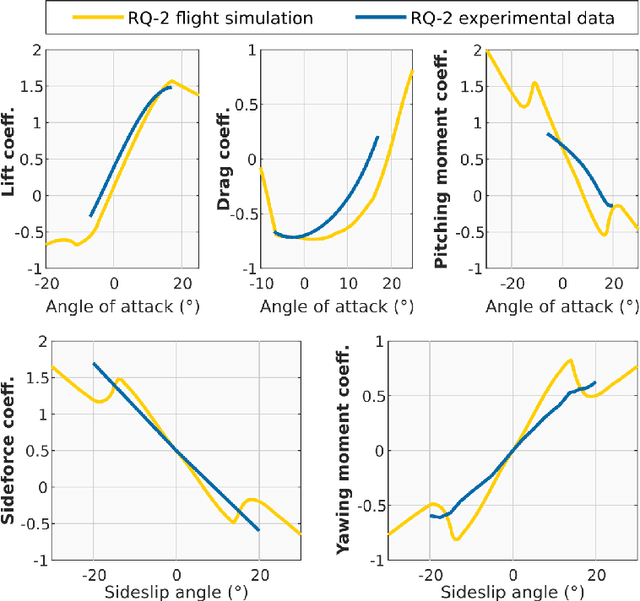
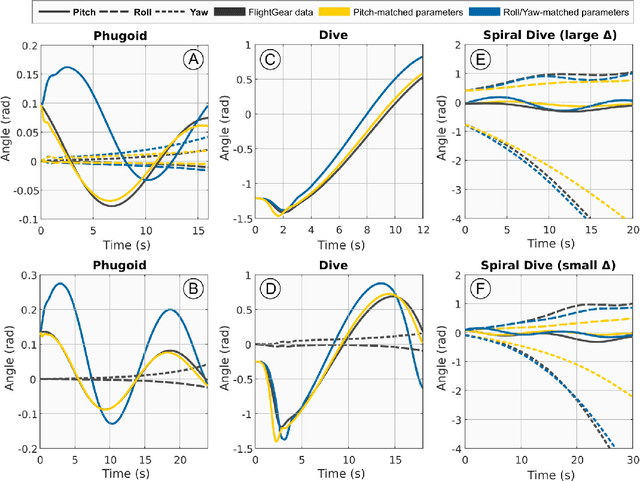
Birds and bats are extraordinarily adept flyers: whether in hunting prey, or evading predators, their agility and manoeuvrability in flight are characteristics of vital importance. Their performance, in this regard, greatly exceeds that of conventional aircraft. Attempts to close this gap in capability have typically focused on thrust-vectoring technology - the domain of classical supermanoeuvrability - at the expense of biomimicry. In this work, however, we show that these approaches are not incompatible: biomimetic wing morphing is an avenue both to classical supermanoeuvrability, and to new forms of biologically-inspired supermanoeuvrability. Using a state-of-the-art flight simulator, equipped with a multibody model of lifting surface motion and a Goman-Khrabrov dynamic stall model for all lifting surfaces, we demonstrate the capability of a biomimetic morphing-wing unmanned aerial vehicles (UAV) for two key forms of supermanoeuvrability: the Pugachev cobra, and ballistic transition. Conclusions are drawn as to the mechanism by which these manoeuvres can be performed, and their feasibility in practical biomimetic unmanned aerial vehicle (UAV). These conclusions have wide relevance to both the design of supermanoeuvrable UAVs, and the study of biological flight dynamics across multiple species.
Multiaxis nose-pointing-and-shooting in a biomimetic morphing-wing aircraft
Jan 10, 2022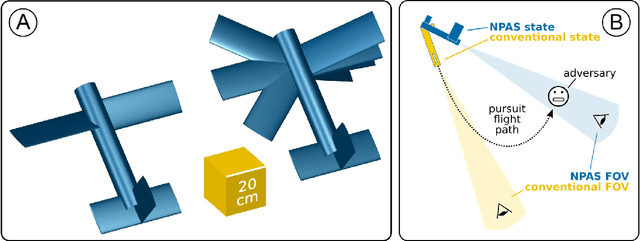
Modern high-performance combat aircraft exceed conventional flight-envelope limits on maneuverability through the use of thrust vectoring, and so achieve supermaneuverability. With ongoing development of biomimetic unmanned aerial vehicles (UAVs), the potential for supermaneuverability through biomimetic mechanisms becomes apparent. So far, this potential has not been well studied: biomimetic UAVs have not yet been shown to be capable of any of the forms of classical supermaneuverability available to thrust-vectored aircraft. Here we show this capability, by demonstrating how biomimetic morphing-wing UAVs can perform sophisticated multiaxis nose-pointing-and-shooting (NPAS) maneuvers at low morphing complexity. Nonlinear flight-dynamic analysis is used to characterize the extent and stability of the multidimensional space of aircraft trim states that arises from biomimetic morphing. Navigating this trim space provides an effective model-based guidance strategy for generating open-loop NPAS maneuvers in simulation. Our results demonstrate the capability of biomimetic aircraft for air combat-relevant supermaneuverability, and provide strategies for the exploration, characterization, and guidance of further forms of classical and non-classical supermaneuverability in such aircraft.
Conditions for energetically-optimal elasticity and their implications for biomimetic propulsion systems
Sep 19, 2021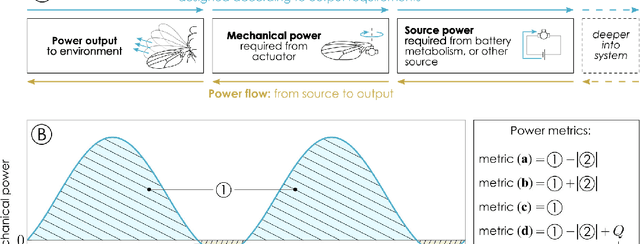
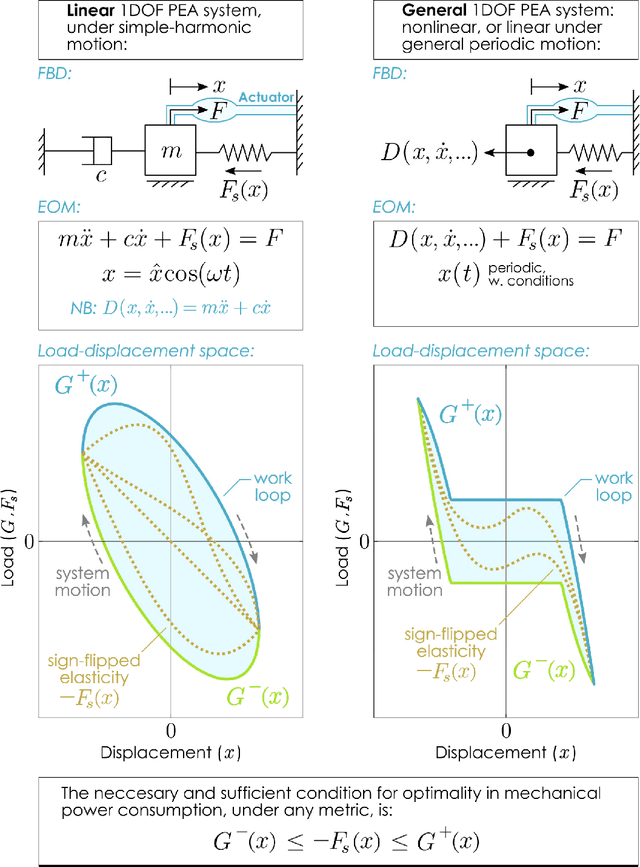
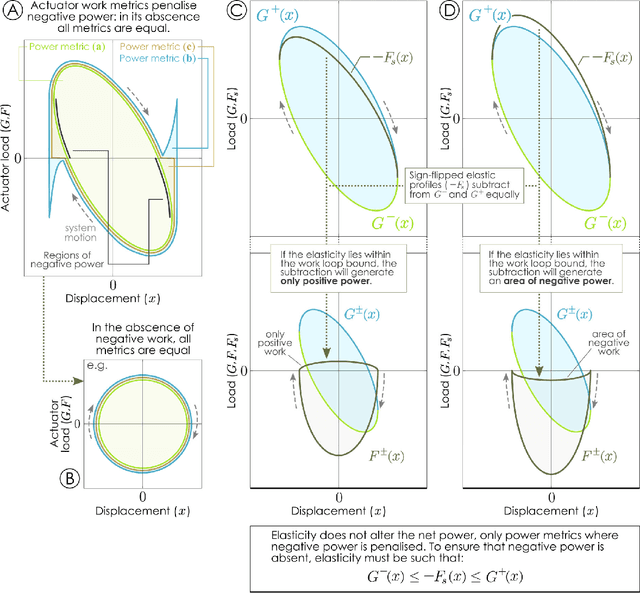
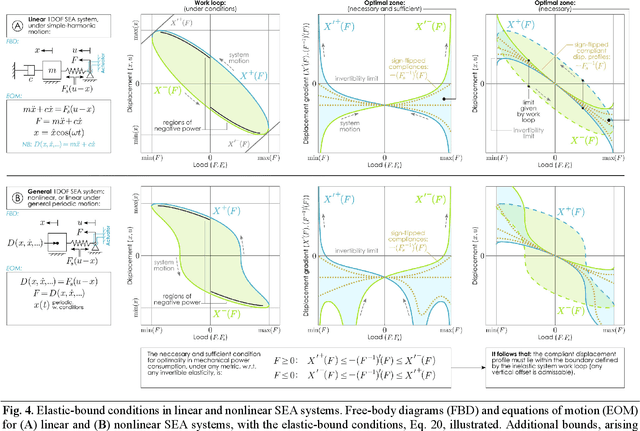
Minimising the energy consumption associated with periodic motion is a priority common to a wide range of technologies and organisms - among them, many species of flying insect, for which flapping-wing flight is a life-essential mode of locomotion. In pursuit of this priority, the following problem often manifests: how to introduce elasticity into an actuated, oscillating, system in order to minimise actuator power consumption? Here, we explore this question in a range of general systems, and find some surprising answers. For instance, it is widely assumed that, if the system dynamics are linear, then linear resonant elasticity is the only optimal choice. We show, to the contrary, that there exist nonlinear elasticities with equivalent optimality, and provide an elegant method for constructing these elasticities in general systems. This is a new principle of linear and nonlinear dynamics, fundamentally altering how questions of energetic optimality in a wide range of dynamical systems must be approached. Furthermore, we show how this principle enables new forms of optimal system design, including optimal unidirectional actuation in nonlinear systems; new tools for the design of optimal biomimetic propulsion systems; and new insights into the role of structural elasticity in a range of different organisms.