 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenMatter: Perceiving Physical Objects with Generative Matter Models
Apr 24, 2026Human visual perception offers valuable insights for understanding computational principles of motion-based scene interpretation. Humans robustly detect and segment moving entities that constitute independently moveable chunks of matter, whether observing sparse moving dots, textured surfaces, or naturalistic scenes. In contrast, existing computer vision systems lack a unified approach that works across these diverse settings. Inspired by principles of human perception, we propose a generative model that hierarchically groups low-level motion cues and high-level appearance features into particles (small Gaussians representing local matter), and groups particles into clusters capturing coherently and independently moveable physical entities. We develop a hardware-accelerated inference algorithm based on parallelized block Gibbs sampling to recover stable particle motion and groupings. Our model operates on different kinds of inputs (random dots, stylized textures, or naturalistic RGB video), enabling it to work across settings where biological vision succeeds but existing computer vision approaches do not. We validate this unified framework across three domains: on 2D random dot kinematograms, our approach captures human object perception including graded uncertainty across ambiguous conditions; on a Gestalt-inspired dataset of camouflaged rotating objects, our approach recovers correct 3D structure from motion and thereby accurate 2D object segmentation; and on naturalistic RGB videos, our model tracks the moving 3D matter that makes up deforming objects, enabling robust object-level scene understanding. This work thus establishes a general framework for motion-based perception grounded in principles of human vision.
A Survey on Machine Learning Approaches for Modelling Intuitive Physics
Feb 14, 2022
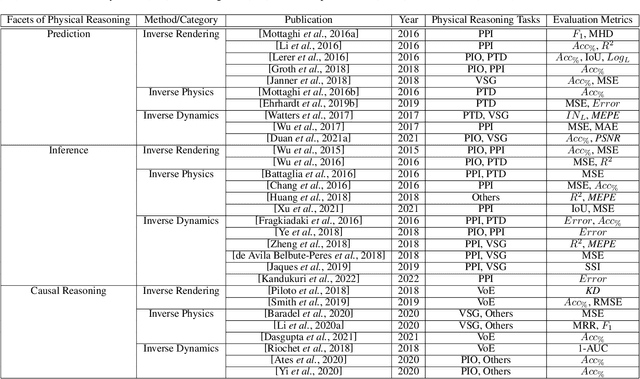
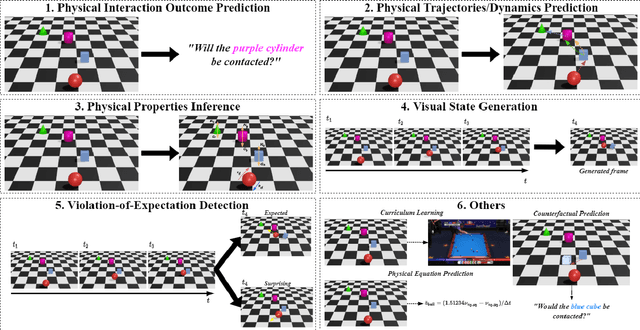
Research in cognitive science has provided extensive evidence on human cognitive ability in performing physical reasoning of objects from noisy perceptual inputs. Such a cognitive ability is commonly known as intuitive physics. With the advancements in deep learning, there is an increasing interest in building intelligent systems that are capable of performing physical reasoning from a given scene for the purpose of advancing fluid and building safer AI systems. As a result, many of the contemporary approaches in modelling intuitive physics for machine cognition have been inspired by literature from cognitive science. Despite the wide range of work in physical reasoning for machine cognition, there is a scarcity of reviews that organize and group these deep learning approaches. Especially at the intersection of intuitive physics and artificial intelligence, there is a need to make sense of the diverse range of ideas and approaches. Therefore, this paper presents a comprehensive survey of recent advances and techniques in intuitive physics-inspired deep learning approaches for physical reasoning. The survey will first categorize existing deep learning approaches into three facets of physical reasoning before organizing them into three general technical approaches and propose six categorical tasks of the field. Finally, we highlight the challenges of the current field and present some future research directions.
Trajectory Prediction & Path Planning for an Object Intercepting UAV with a Mounted Depth Camera
Nov 17, 2021
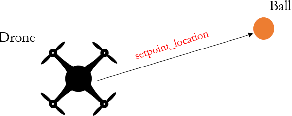
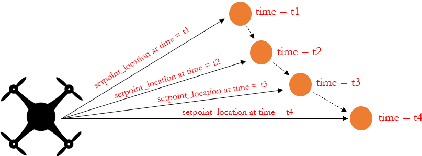
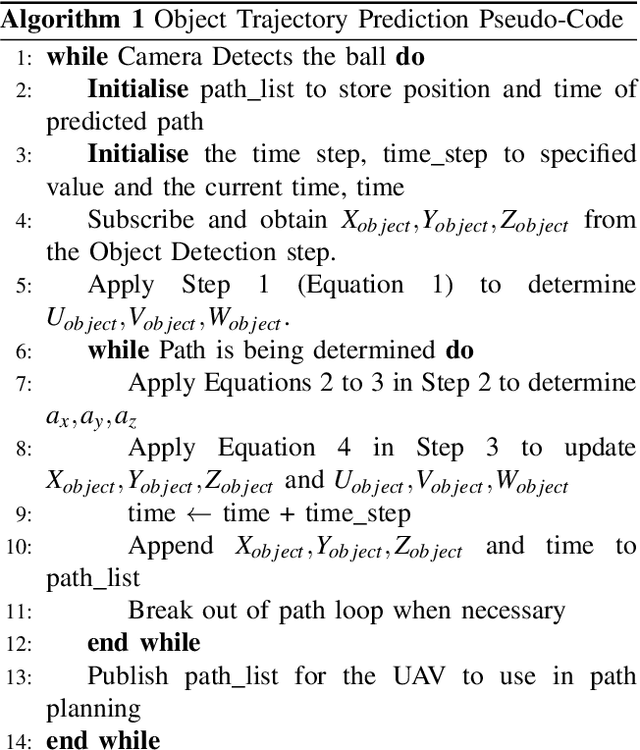
A novel control & software architecture using ROS C++ is introduced for object interception by a UAV with a mounted depth camera and no external aid. Existing work in trajectory prediction focused on the use of off-board tools like motion capture rooms to intercept thrown objects. The present study designs the UAV architecture to be completely on-board capable of object interception with the use of a depth camera and point cloud processing. The architecture uses an iterative trajectory prediction algorithm for non-propelled objects like a ping-pong ball. A variety of path planning approaches to object interception and their corresponding scenarios are discussed, evaluated & simulated in Gazebo. The successful simulations exemplify the potential of using the proposed architecture for the on-board autonomy of UAVs intercepting objects.
Exploring Unsupervised Learning Methods for Automated Protocol Analysis
Nov 17, 2021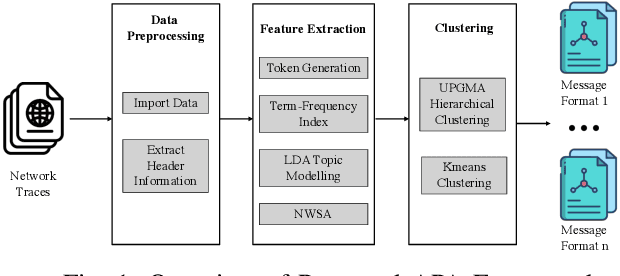
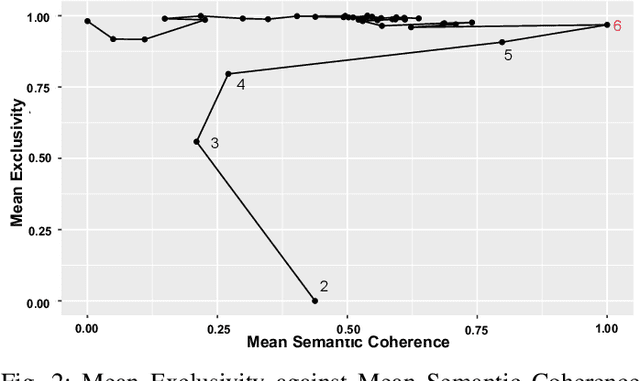
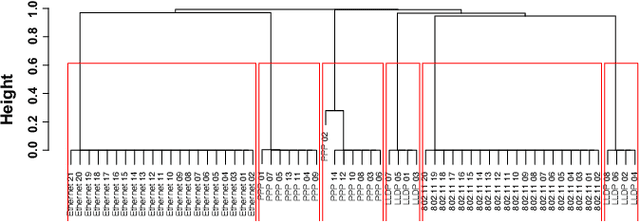
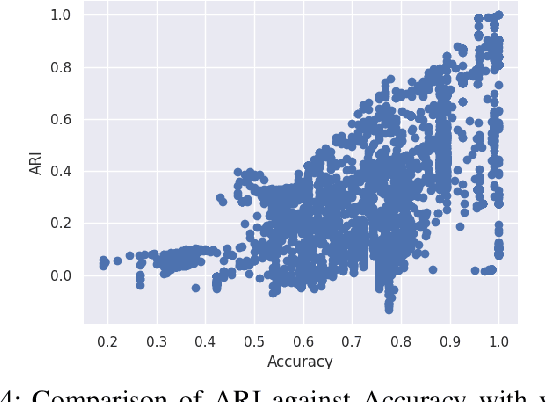
The ability to analyse and differentiate network protocol traffic is crucial for network resource management to provide differentiated services by Telcos. Automated Protocol Analysis (APA) is crucial to significantly improve efficiency and reduce reliance on human experts. There are numerous automated state-of-the-art unsupervised methods for clustering unknown protocols in APA. However, many such methods have not been sufficiently explored using diverse test datasets. Thus failing to demonstrate their robustness to generalise. This study proposed a comprehensive framework to evaluate various combinations of feature extraction and clustering methods in APA. It also proposed a novel approach to automate selection of dataset dependent model parameters for feature extraction, resulting in improved performance. Promising results of a novel field-based tokenisation approach also led to our proposal of a novel automated hybrid approach for feature extraction and clustering of unknown protocols in APA. Our proposed hybrid approach performed the best in 7 out of 9 of the diverse test datasets, thus displaying the robustness to generalise across diverse unknown protocols. It also outperformed the unsupervised clustering technique in state-of-the-art open-source APA tool, NETZOB in all test datasets.
A Benchmark for Modeling Violation-of-Expectation in Physical Reasoning Across Event Categories
Nov 16, 2021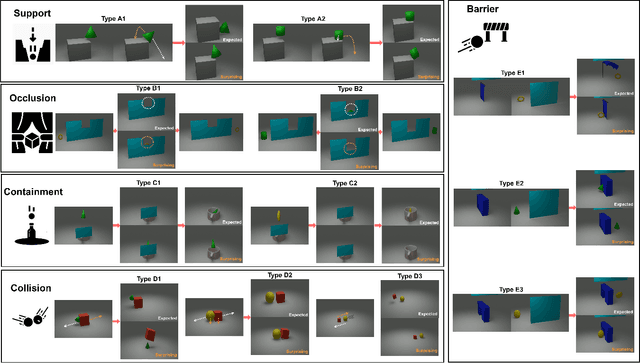

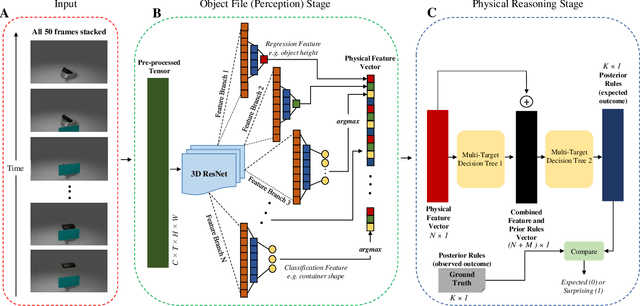
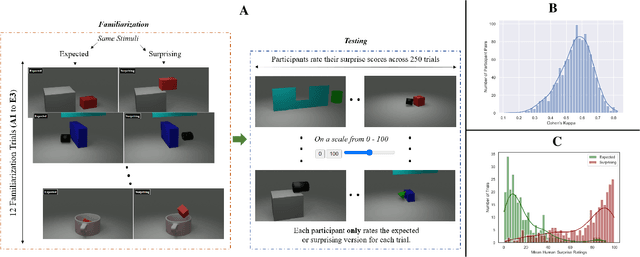
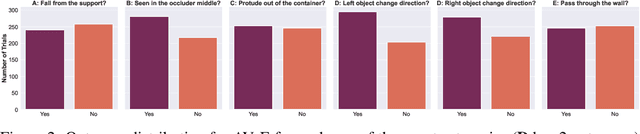
Recent work in computer vision and cognitive reasoning has given rise to an increasing adoption of the Violation-of-Expectation (VoE) paradigm in synthetic datasets. Inspired by infant psychology, researchers are now evaluating a model's ability to label scenes as either expected or surprising with knowledge of only expected scenes. However, existing VoE-based 3D datasets in physical reasoning provide mainly vision data with little to no heuristics or inductive biases. Cognitive models of physical reasoning reveal infants create high-level abstract representations of objects and interactions. Capitalizing on this knowledge, we established a benchmark to study physical reasoning by curating a novel large-scale synthetic 3D VoE dataset armed with ground-truth heuristic labels of causally relevant features and rules. To validate our dataset in five event categories of physical reasoning, we benchmarked and analyzed human performance. We also proposed the Object File Physical Reasoning Network (OFPR-Net) which exploits the dataset's novel heuristics to outperform our baseline and ablation models. The OFPR-Net is also flexible in learning an alternate physical reality, showcasing its ability to learn universal causal relationships in physical reasoning to create systems with better interpretability.
AVoE: A Synthetic 3D Dataset on Understanding Violation of Expectation for Artificial Cognition
Oct 12, 2021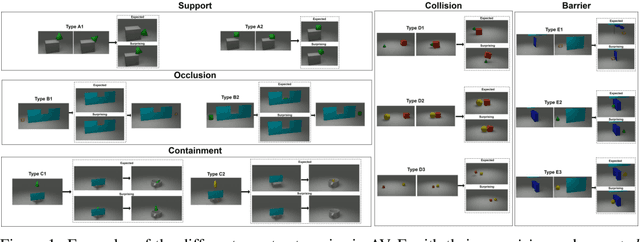

Recent work in cognitive reasoning and computer vision has engendered an increasing popularity for the Violation-of-Expectation (VoE) paradigm in synthetic datasets. Inspired by work in infant psychology, researchers have started evaluating a model's ability to discriminate between expected and surprising scenes as a sign of its reasoning ability. Existing VoE-based 3D datasets in physical reasoning only provide vision data. However, current cognitive models of physical reasoning by psychologists reveal infants create high-level abstract representations of objects and interactions. Capitalizing on this knowledge, we propose AVoE: a synthetic 3D VoE-based dataset that presents stimuli from multiple novel sub-categories for five event categories of physical reasoning. Compared to existing work, AVoE is armed with ground-truth labels of abstract features and rules augmented to vision data, paving the way for high-level symbolic predictions in physical reasoning tasks.