 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Principal Curve-Based Classifiers and Similarity-Based Selective Sampling in Time-Series
Apr 10, 2022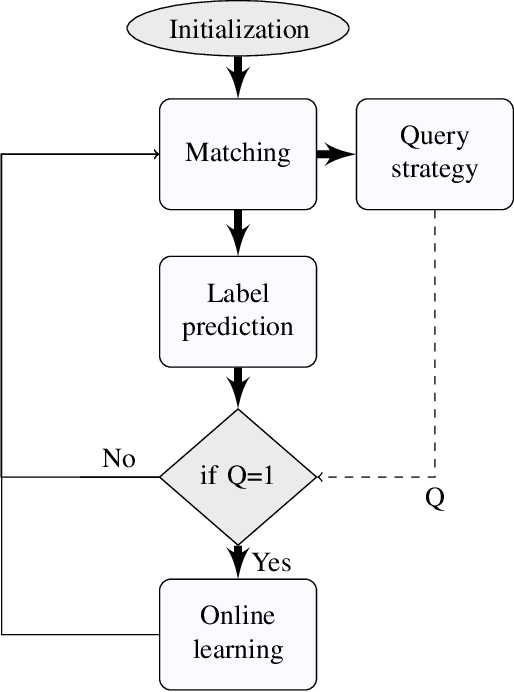
Considering the concept of time-dilation, there exist some major issues with recurrent neural Architectures. Any variation in time spans between input data points causes performance attenuation in recurrent neural network architectures. Principal curve-based classifiers have the ability of handling any kind of variation in time spans. In other words, principal curve-based classifiers preserve the relativity of time while neural network architecture violates this property of time. On the other hand, considering the labeling costs and problems in online monitoring devices, there should be an algorithm that finds the data points which knowing their labels will cause in better performance of the classifier. Current selective sampling algorithms have lack of reliability due to the randomness of the proposed algorithms. This paper proposes a classifier and also a deterministic selective sampling algorithm with the same computational steps, both by use of principal curve as their building block in model definition.
Interpretable Reinforcement Learning Inspired by Piaget's Theory of Cognitive Development
Feb 01, 2021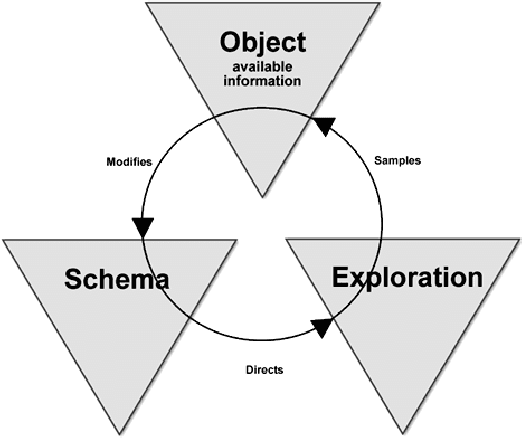
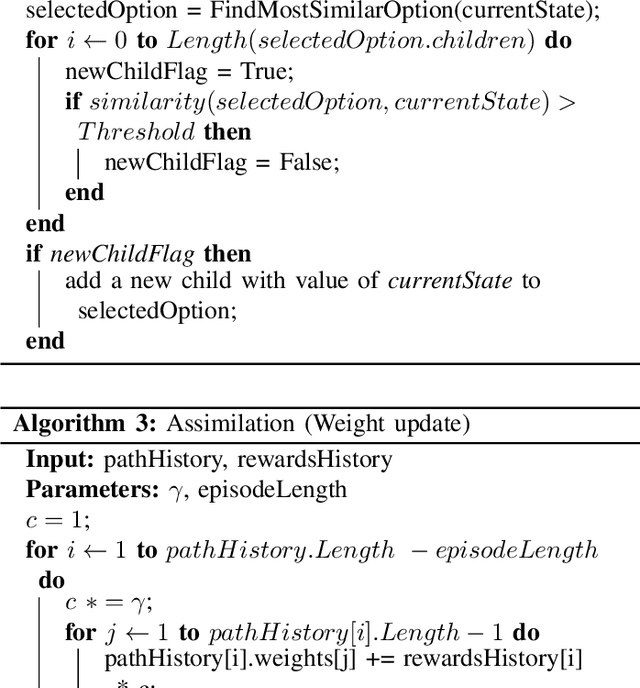
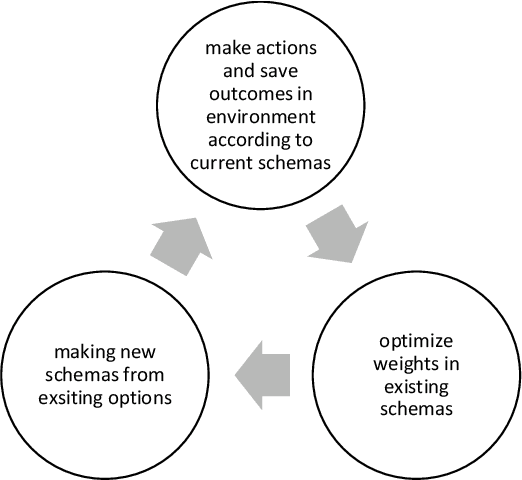
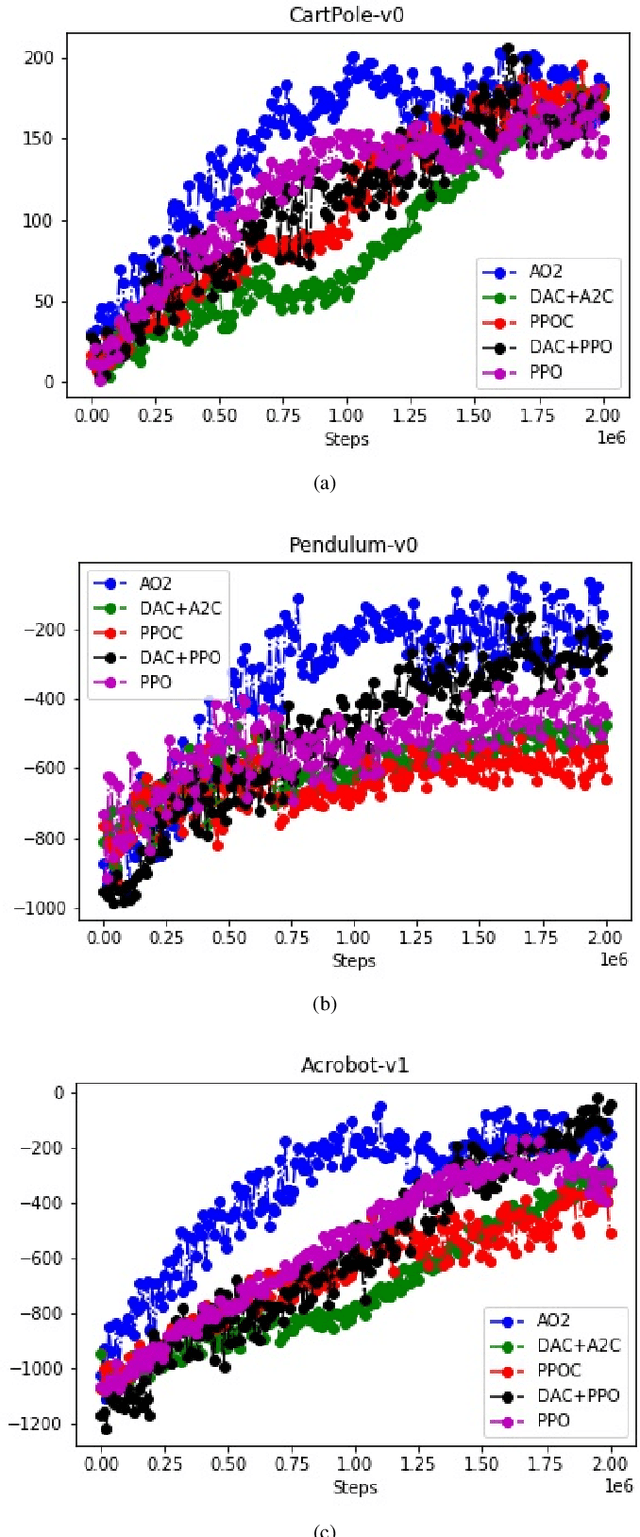
Endeavors for designing robots with human-level cognitive abilities have led to different categories of learning machines. According to Skinner's theory, reinforcement learning (RL) plays a key role in human intuition and cognition. Majority of the state-of-the-art methods including deep RL algorithms are strongly influenced by the connectionist viewpoint. Such algorithms can significantly benefit from theories of mind and learning in other disciplines. This paper entertains the idea that theories such as language of thought hypothesis (LOTH), script theory, and Piaget's cognitive development theory provide complementary approaches, which will enrich the RL field. Following this line of thinking, a general computational building block is proposed for Piaget's schema theory that supports the notions of productivity, systematicity, and inferential coherence as described by Fodor in contrast with the connectionism theory. Abstraction in the proposed method is completely upon the system itself and is not externally constrained by any predefined architecture. The whole process matches the Neisser's perceptual cycle model. Performed experiments on three typical control problems followed by behavioral analysis confirm the interpretability of the proposed method and its competitiveness compared to the state-of-the-art algorithms. Hence, the proposed framework can be viewed as a step towards achieving human-like cognition in artificial intelligent systems.
Enacted Visual Perception: A Computational Model based on Piaget Equilibrium
Jan 30, 2021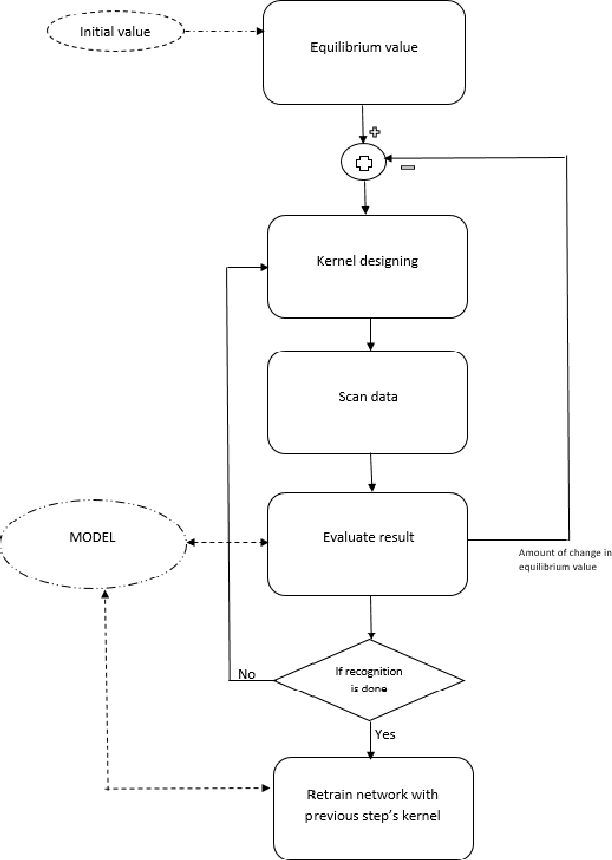
In Maurice Merleau-Ponty's phenomenology of perception, analysis of perception accounts for an element of intentionality, and in effect therefore, perception and action cannot be viewed as distinct procedures. In the same line of thinking, Alva No\"{e} considers perception as a thoughtful activity that relies on capacities for action and thought. Here, by looking into psychology as a source of inspiration, we propose a computational model for the action involved in visual perception based on the notion of equilibrium as defined by Jean Piaget. In such a model, Piaget's equilibrium reflects the mind's status, which is used to control the observation process. The proposed model is built around a modified version of convolutional neural networks (CNNs) with enhanced filter performance, where characteristics of filters are adaptively adjusted via a high-level control signal that accounts for the thoughtful activity in perception. While the CNN plays the role of the visual system, the control signal is assumed to be a product of mind.