 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Exoskeleton Interaction Portrait
Mar 11, 2024Human-robot physical interaction contains crucial information for optimizing user experience, enhancing robot performance, and objectively assessing user adaptation. This study introduces a new method to evaluate human-robot co-adaptation in lower limb exoskeletons by analyzing muscle activity and interaction torque as a two-dimensional random variable. We introduce the Interaction Portrait (IP), which visualizes this variable's distribution in polar coordinates. We applied this metric to compare a recent torque controller (HTC) based on kinematic state feedback and a novel feedforward controller (AMTC) with online learning, proposed herein, against a time-based controller (TBC) during treadmill walking at varying speeds. Compared to TBC, both HTC and AMTC significantly lower users' normalized oxygen uptake, suggesting enhanced user-exoskeleton coordination. IP analysis reveals this improvement stems from two distinct co-adaptation strategies, unidentifiable by traditional muscle activity or interaction torque analyses alone. HTC encourages users to yield control to the exoskeleton, decreasing muscular effort but increasing interaction torque, as the exoskeleton compensates for user dynamics. Conversely, AMTC promotes user engagement through increased muscular effort and reduced interaction torques, aligning it more closely with rehabilitation and gait training applications. IP phase evolution provides insight into each user's interaction strategy development, showcasing IP analysis's potential in comparing and designing novel controllers to optimize human-robot interaction in wearable robots.
Cable-driven robotic interface for lower limb neuromechanics identification
Aug 07, 2019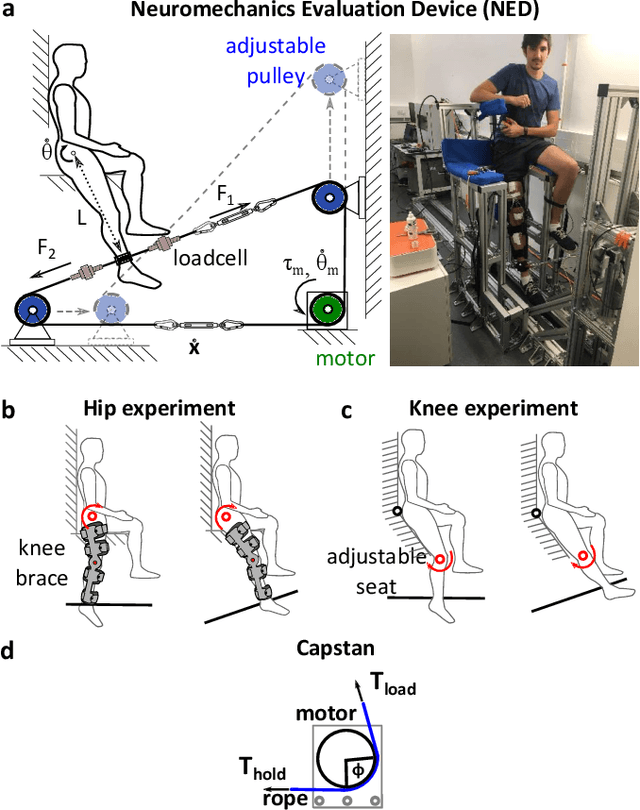
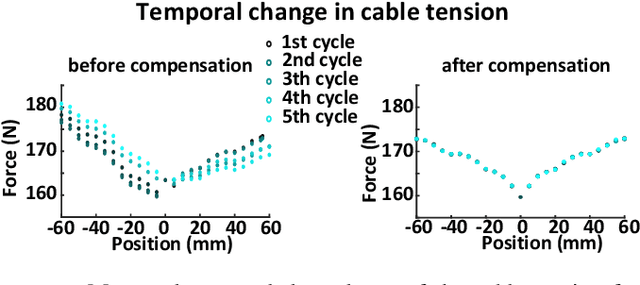
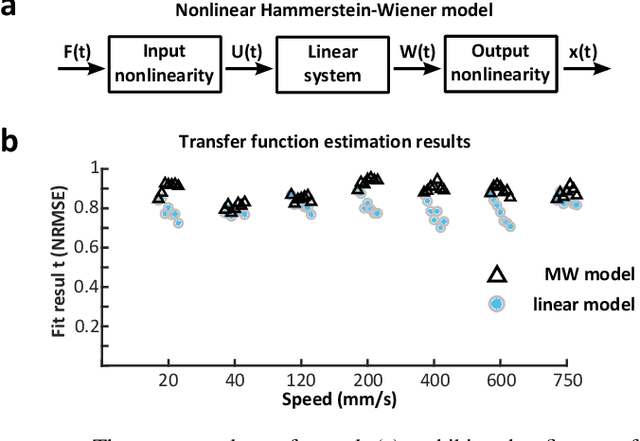
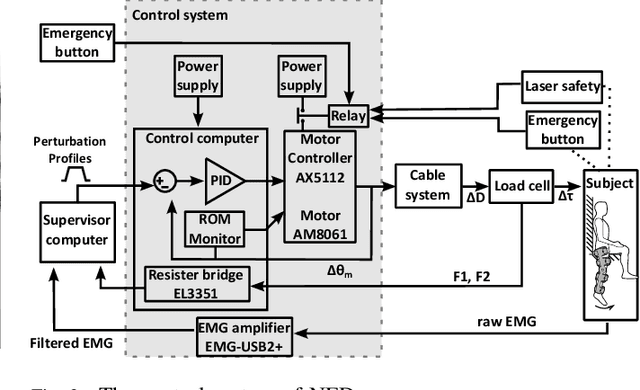
This paper presents a versatile cable-driven robotic interface to investigate the single-joint joint neuromechanics of the hip, knee and ankle. This endpoint-based interface offers highly dynamic interaction and accurate position control, as is typically required for neuromechanics identification. It can be used with the subject upright, corresponding to natural posture during walking or standing, and does not impose kinematic constraints on a joint, in contrast to existing interfaces. Mechanical evaluations demonstrated that the interface yields a rigidity above 500N/m with low viscosity. Tests with a rigid dummy leg and linear springs show that it can identify the mechanical impedance of a limb accurately. A smooth perturbation is developed and tested with a human subject, which can be used to estimate the hip neuromechanics.