 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantifying Teaching Behaviour in Robot Learning from Demonstration
May 10, 2019
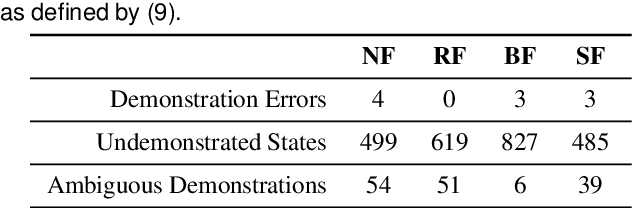

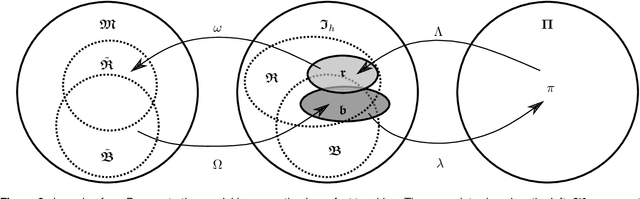
Learning from demonstration allows for rapid deployment of robot manipulators to a great many tasks, by relying on a person showing the robot what to do rather than programming it. While this approach provides many opportunities, measuring, evaluating and improving the person's teaching ability has remained largely unexplored in robot manipulation research. To this end, a model for learning from demonstration is presented here which incorporates the teacher's understanding of, and influence on, the learner. The proposed model is used to clarify the teacher's objectives during learning from demonstration, providing new views on how teaching failures and efficiency can be defined. The benefit of this approach is shown in two experiments (N=30 and N=36, respectively), which highlight the difficulty teachers have in providing effective demonstrations, and show how ~169-180% improvement in teaching efficiency can be achieved through evaluation and feedback shaped by the proposed framework, relative to unguided teaching.
Improving Task-Parameterised Movement Learning Generalisation with Frame-Weighted Trajectory Generation
Mar 04, 2019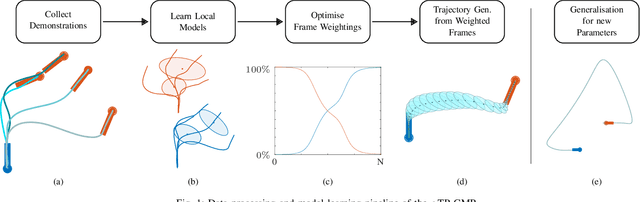
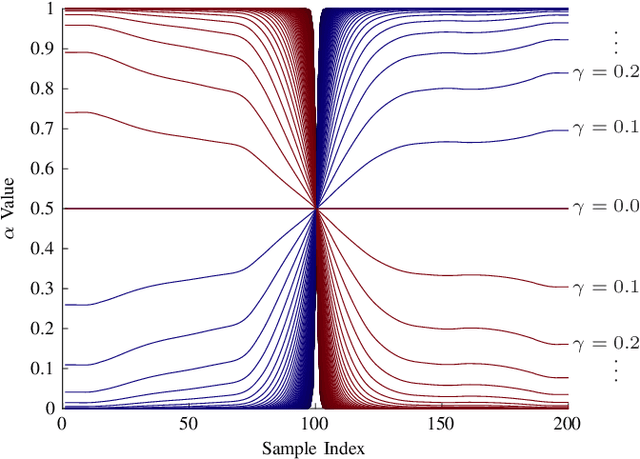
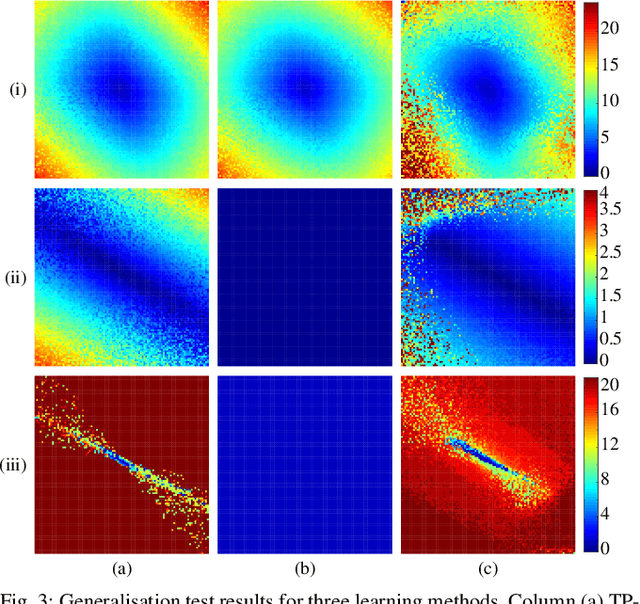
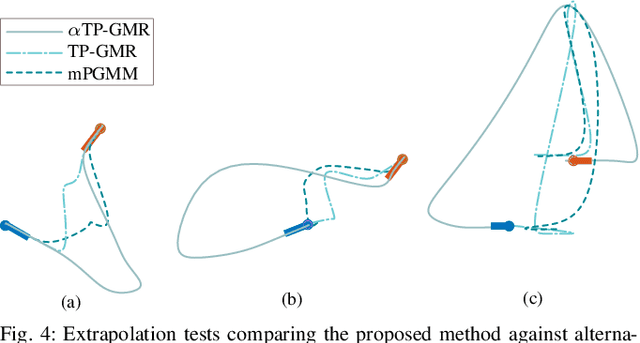
Learning from Demonstration depends on a robot learner generalising its learned model to unseen conditions, as it is not feasible for a person to provide a demonstration set that accounts for all possible variations in non-trivial tasks. While there are many learning methods that can handle interpolation of observed data effectively, extrapolation from observed data offers a much greater challenge. To address this problem of generalisation, this paper proposes a modified Task-Parameterised Gaussian Mixture Regression method that considers the relevance of task parameters during trajectory generation, as determined by variance in the data. The benefits of the proposed method are first explored using a simulated reaching task data set. Here it is shown that the proposed method offers far-reaching, low-error extrapolation abilities that are different in nature to existing learning methods. Data collected from novice users for a real-world manipulation task is then considered, where it is shown that the proposed method is able to effectively reduce grasping performance errors by ${\sim30\%}$ and extrapolate to unseen grasp targets under real-world conditions. These results indicate the proposed method serves to benefit novice users by placing less reliance on the user to provide high quality demonstration data sets.