 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTopology-Informed Model Predictive Control for Anticipatory Collision Avoidance on a Ballbot
Sep 10, 2021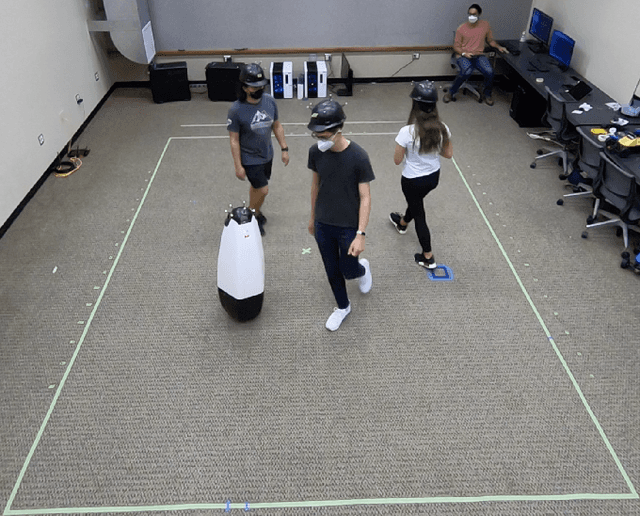
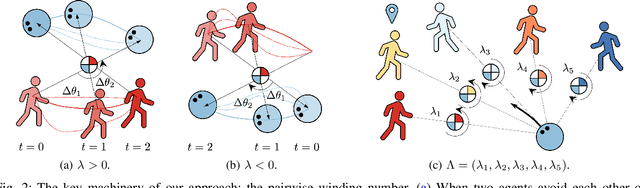
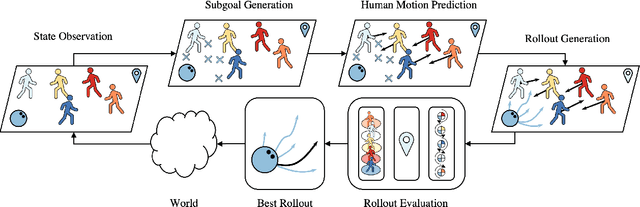
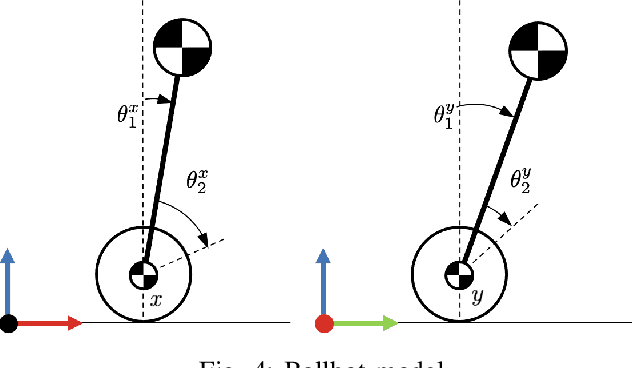
We focus on the problem of planning safe and efficient motion for a ballbot (i.e., a dynamically balancing mobile robot), navigating in a crowded environment. The ballbot's design gives rise to human-readable motion which is valuable for crowd navigation. However, dynamic stabilization introduces kinematic constraints that severely limit the ability of the robot to execute aggressive maneuvers, complicating collision avoidance and respect for human personal space. Past works reduce the need for aggressive maneuvering by motivating anticipatory collision avoidance through the use of human motion prediction models. However, multiagent behavior prediction is hard due to the combinatorial structure of the space. Our key insight is that we can accomplish anticipatory multiagent collision avoidance without high-fidelity prediction models if we capture fundamental features of multiagent dynamics. To this end, we build a model predictive control architecture that employs a constant-velocity model of human motion prediction but monitors and proactively adapts to the unfolding homotopy class of crowd-robot dynamics by taking actions that maximize the pairwise winding numbers between the robot and each human agent. This results in robot motion that accomplishes statistically significantly higher clearances from the crowd compared to state-of-the-art baselines while maintaining similar levels of efficiency, across a variety of challenging physical scenarios and crowd simulators.