 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph Coordinates and Conventional Neural Networks -- An Alternative for Graph Neural Networks
Dec 03, 2023Graph-based data present unique challenges and opportunities for machine learning. Graph Neural Networks (GNNs), and especially those algorithms that capture graph topology through message passing for neighborhood aggregation, have been a leading solution. However, these networks often require substantial computational resources and may not optimally leverage the information contained in the graph's topology, particularly for large-scale or complex graphs. We propose Topology Coordinate Neural Network (TCNN) and Directional Virtual Coordinate Neural Network (DVCNN) as novel and efficient alternatives to message passing GNNs, that directly leverage the graph's topology, sidestepping the computational challenges presented by competing algorithms. Our proposed methods can be viewed as a reprise of classic techniques for graph embedding for neural network feature engineering, but they are novel in that our embedding techniques leverage ideas in Graph Coordinates (GC) that are lacking in current practice. Experimental results, benchmarked against the Open Graph Benchmark Leaderboard, demonstrate that TCNN and DVCNN achieve competitive or superior performance to message passing GNNs. For similar levels of accuracy and ROC-AUC, TCNN and DVCNN need far fewer trainable parameters than contenders of the OGBN Leaderboard. The proposed TCNN architecture requires fewer parameters than any neural network method currently listed in the OGBN Leaderboard for both OGBN-Proteins and OGBN-Products datasets. Conversely, our methods achieve higher performance for a similar number of trainable parameters. By providing an efficient and effective alternative to message passing GNNs, our work expands the toolbox of techniques for graph-based machine learning.
Investigative Pattern Detection Framework for Counterterrorism
Oct 30, 2023Law-enforcement investigations aimed at preventing attacks by violent extremists have become increasingly important for public safety. The problem is exacerbated by the massive data volumes that need to be scanned to identify complex behaviors of extremists and groups. Automated tools are required to extract information to respond queries from analysts, continually scan new information, integrate them with past events, and then alert about emerging threats. We address challenges in investigative pattern detection and develop an Investigative Pattern Detection Framework for Counterterrorism (INSPECT). The framework integrates numerous computing tools that include machine learning techniques to identify behavioral indicators and graph pattern matching techniques to detect risk profiles/groups. INSPECT also automates multiple tasks for large-scale mining of detailed forensic biographies, forming knowledge networks, and querying for behavioral indicators and radicalization trajectories. INSPECT targets human-in-the-loop mode of investigative search and has been validated and evaluated using an evolving dataset on domestic jihadism.
Reconstruction of Fragmented Trajectories of Collective Motion using Hadamard Deep Autoencoders
Oct 20, 2021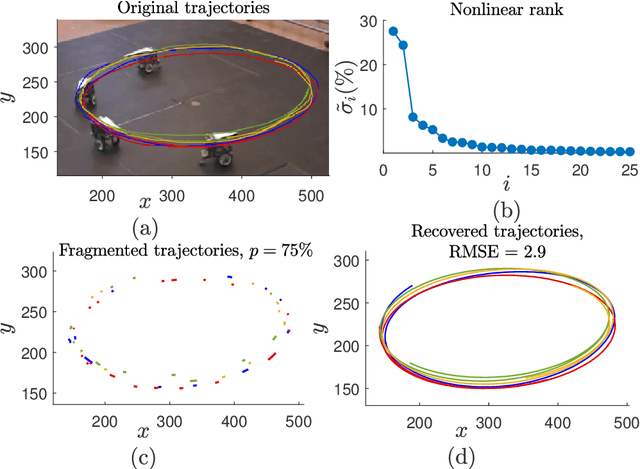
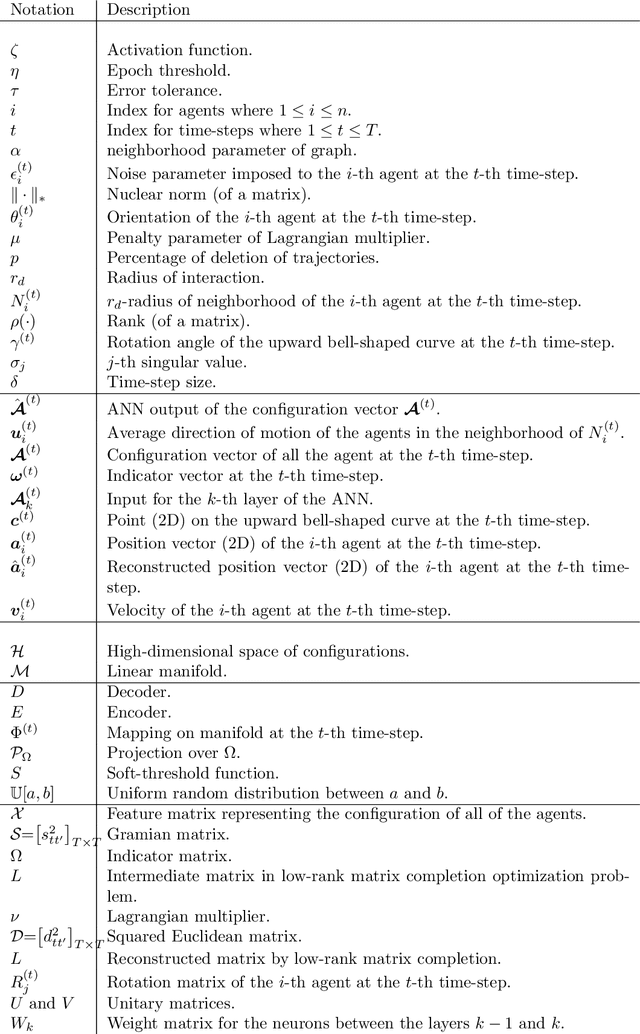
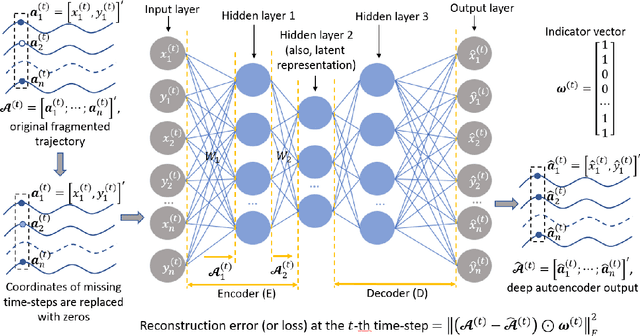
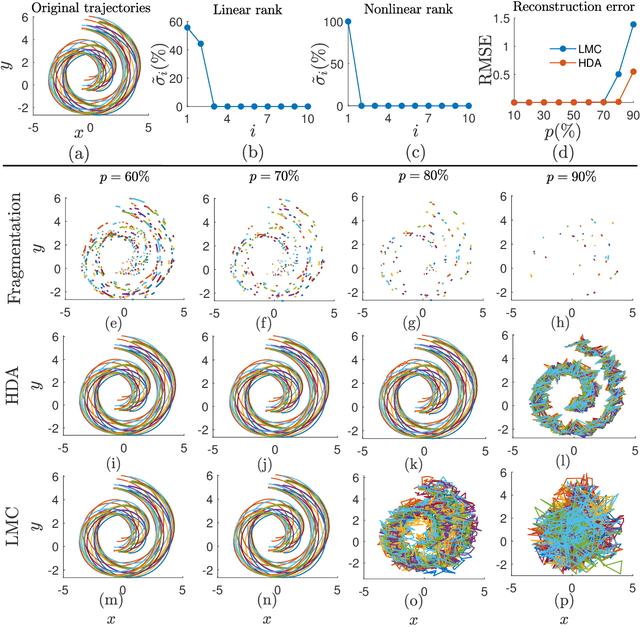
Learning dynamics of collectively moving agents such as fish or humans is an active field in research. Due to natural phenomena such as occlusion and change of illumination, the multi-object methods tracking such dynamics might lose track of the agents where that might result fragmentation in the constructed trajectories. Here, we present an extended deep autoencoder (DA) that we train only on fully observed segments of the trajectories by defining its loss function as the Hadamard product of a binary indicator matrix with the absolute difference between the outputs and the labels. The trajectories of the agents practicing collective motion is low-rank due to mutual interactions and dependencies between the agents that we utilize as the underlying pattern that our Hadamard deep autoencoder (HDA) codes during its training. The performance of our HDA is compared with that of a low-rank matrix completion scheme in the context of fragmented trajectory reconstruction.
A Patch-based Image Denoising Method Using Eigenvectors of the Geodesics' Gramian Matrix
Oct 14, 2020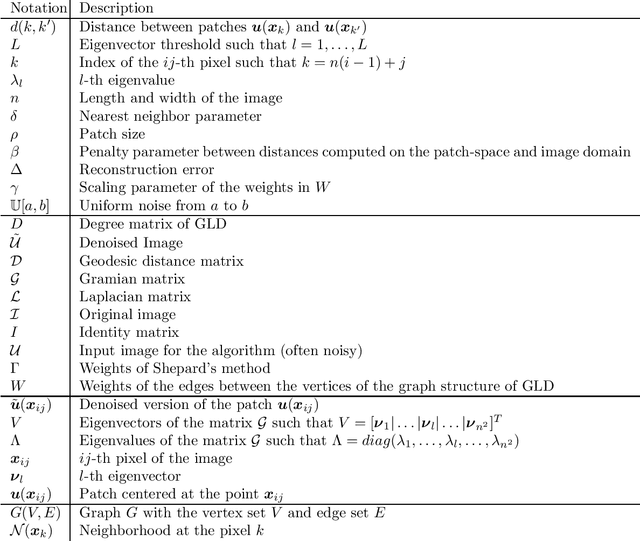
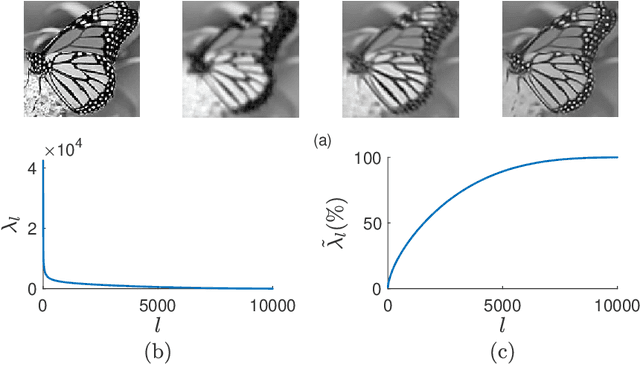
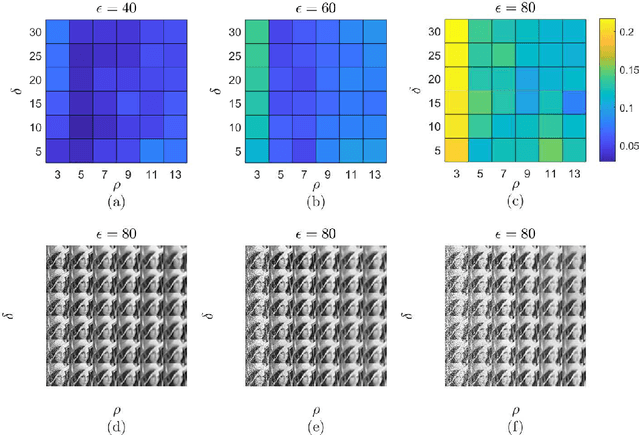
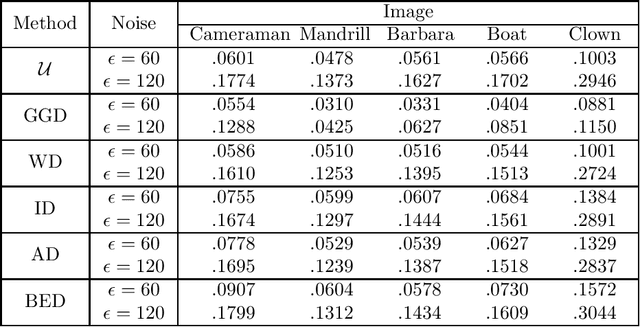
With the sophisticated modern technology in the camera industry, the demand for accurate and visually pleasing images is increasing. However, the quality of images captured by cameras are inevitably degraded by noise. Thus, some processing on images is required to filter out the noise without losing vital image features such as edges, corners, etc. Even though the current literature offers a variety of denoising methods, fidelity and efficiency of their denoising are sometimes uncertain. Thus, here we propose a novel and computationally efficient image denoising method that is capable of producing an accurate output. This method inputs patches partitioned from the image rather than pixels that are well known for preserving image smoothness. Then, it performs denoising on the manifold underlying the patch-space rather than that in the image domain to better preserve the features across the whole image. We validate the performance of this method against benchmark image processing methods.