 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparative Study of Human Motion Models in Reinforcement Learning Algorithms for Social Robot Navigation
Mar 19, 2025Social robot navigation is an evolving research field that aims to find efficient strategies to safely navigate dynamic environments populated by humans. A critical challenge in this domain is the accurate modeling of human motion, which directly impacts the design and evaluation of navigation algorithms. This paper presents a comparative study of two popular categories of human motion models used in social robot navigation, namely velocity-based models and force-based models. A system-theoretic representation of both model types is presented, which highlights their common feedback structure, although with different state variables. Several navigation policies based on reinforcement learning are trained and tested in various simulated environments involving pedestrian crowds modeled with these approaches. A comparative study is conducted to assess performance across multiple factors, including human motion model, navigation policy, scenario complexity and crowd density. The results highlight advantages and challenges of different approaches to modeling human behavior, as well as their role during training and testing of learning-based navigation policies. The findings offer valuable insights and guidelines for selecting appropriate human motion models when designing socially-aware robot navigation systems.
Asynchronous Distributed Learning from Constraints
Nov 13, 2019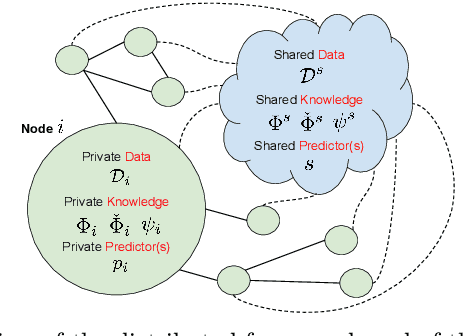

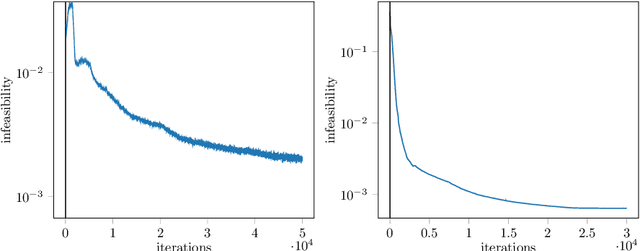
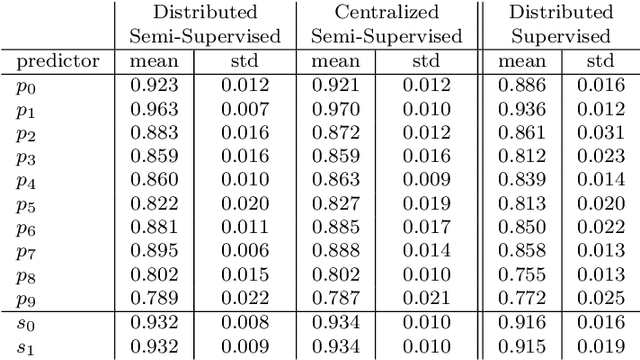
In this paper, the extension of the framework of Learning from Constraints (LfC) to a distributed setting where multiple parties, connected over the network, contribute to the learning process is studied. LfC relies on the generic notion of "constraint" to inject knowledge into the learning problem and, due to its generality, it deals with possibly nonconvex constraints, enforced either in a hard or soft way. Motivated by recent progresses in the field of distributed and constrained nonconvex optimization, we apply the (distributed) Asynchronous Method of Multipliers (ASYMM) to LfC. The study shows that such a method allows us to support scenarios where selected constraints (i.e., knowledge), data, and outcomes of the learning process can be locally stored in each computational node without being shared with the rest of the network, opening the road to further investigations into privacy-preserving LfC. Constraints act as a bridge between what is shared over the net and what is private to each node and no central authority is required. We demonstrate the applicability of these ideas in two distributed real-world settings in the context of digit recognition and document classification.
Upper Body Pose Estimation Using Wearable Inertial Sensors and Multiplicative Kalman Filter
Sep 24, 2019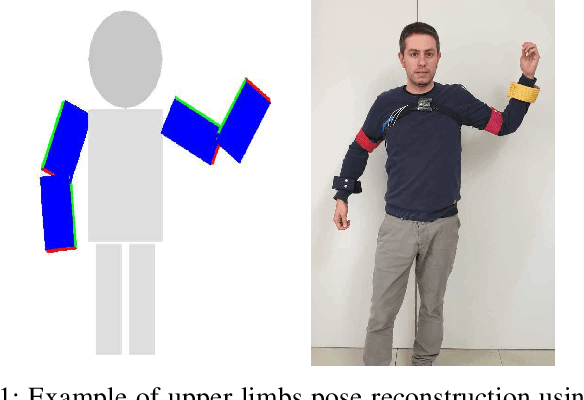
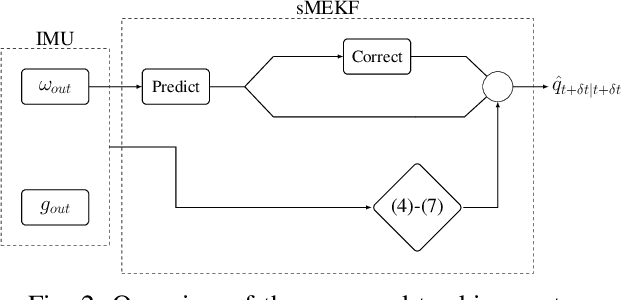
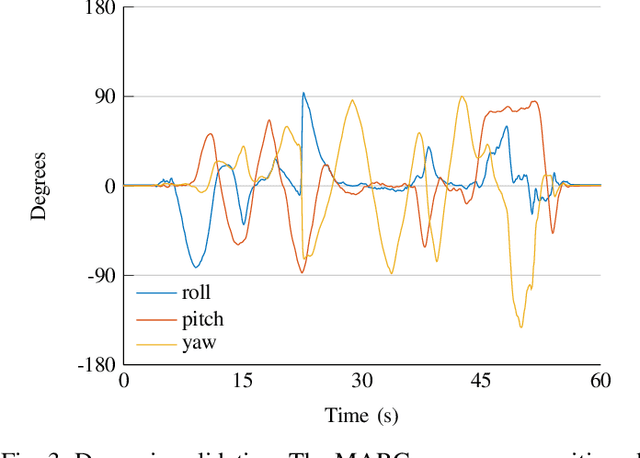
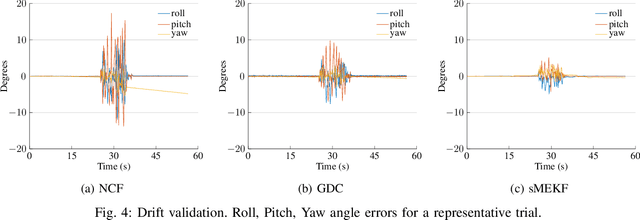
Estimating the limbs pose in a wearable way may benefit multiple areas such as rehabilitation, teleoperation, human-robot interaction, gaming, and many more. Several solutions are commercially available, but they are usually expensive or not wearable/portable. We present a wearable pose estimation system (WePosE), based on inertial measurements units (IMUs), for motion analysis and body tracking. Differently from camera-based approaches, the proposed system does not suffer from occlusion problems and lighting conditions, it is cost effective and it can be used in indoor and outdoor environments. Moreover, since only accelerometers and gyroscopes are used to estimate the orientation, the system can be used also in the presence of iron and magnetic disturbances. An experimental validation using a high precision optical tracker has been performed. Results confirmed the effectiveness of the proposed approach.
* 8 pages, 8 figures