 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWorld-Gymnast: Training Robots with Reinforcement Learning in a World Model
Feb 02, 2026Robot learning from interacting with the physical world is fundamentally bottlenecked by the cost of physical interaction. The two alternatives, supervised finetuning (SFT) from expert demonstrations and reinforcement learning (RL) in a software-based simulator, are limited by the amount of expert data available and the sim-to-real gap for manipulation. With the recent emergence of world models learned from real-world video-action data, we ask the question of whether training a policy in a world model can be more effective than supervised learning or software simulation in achieving better real-robot performance. We propose World-Gymnast, which performs RL finetuning of a vision-language-action (VLA) policy by rolling out the policy in an action-conditioned video world model and rewarding the rollouts with a vision-language model (VLM). On the Bridge robot setup, World-Gymnast outperforms SFT by as much as 18x and outperforms software simulator by as much as 2x. More importantly, World-Gymnast demonstrates intriguing capabilities of RL with a world model, including training on diverse language instructions and novel scenes from the world model, test-time training in a novel scene, and online iterative world model and policy improvement. Our results suggest learning a world model and training robot policies in the cloud could be the key to bridging the gap between robots that work in demonstrations and robots that can work in anyone's household.
Node Injection for Class-specific Network Poisoning
Jan 28, 2023Graph Neural Networks (GNNs) are powerful in learning rich network representations that aid the performance of downstream tasks. However, recent studies showed that GNNs are vulnerable to adversarial attacks involving node injection and network perturbation. Among these, node injection attacks are more practical as they don't require manipulation in the existing network and can be performed more realistically. In this paper, we propose a novel problem statement - a class-specific poison attack on graphs in which the attacker aims to misclassify specific nodes in the target class into a different class using node injection. Additionally, nodes are injected in such a way that they camouflage as benign nodes. We propose NICKI, a novel attacking strategy that utilizes an optimization-based approach to sabotage the performance of GNN-based node classifiers. NICKI works in two phases - it first learns the node representation and then generates the features and edges of the injected nodes. Extensive experiments and ablation studies on four benchmark networks show that NICKI is consistently better than four baseline attacking strategies for misclassifying nodes in the target class. We also show that the injected nodes are properly camouflaged as benign, thus making the poisoned graph indistinguishable from its clean version w.r.t various topological properties.
DAGSurv: Directed Acyclic Graph Based Survival Analysis Using Deep Neural Networks
Nov 02, 2021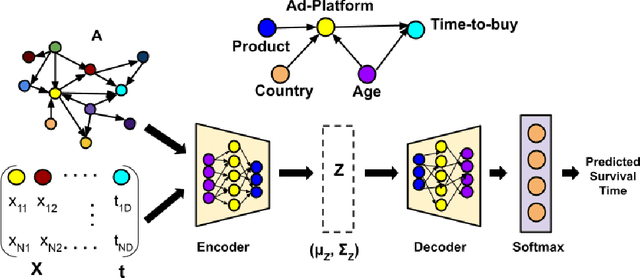
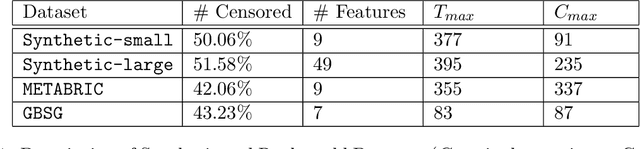
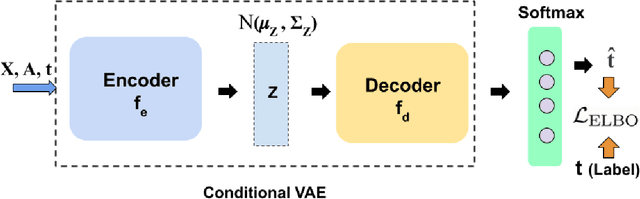

Causal structures for observational survival data provide crucial information regarding the relationships between covariates and time-to-event. We derive motivation from the information theoretic source coding argument, and show that incorporating the knowledge of the directed acyclic graph (DAG) can be beneficial if suitable source encoders are employed. As a possible source encoder in this context, we derive a variational inference based conditional variational autoencoder for causal structured survival prediction, which we refer to as DAGSurv. We illustrate the performance of DAGSurv on low and high-dimensional synthetic datasets, and real-world datasets such as METABRIC and GBSG. We demonstrate that the proposed method outperforms other survival analysis baselines such as Cox Proportional Hazards, DeepSurv and Deephit, which are oblivious to the underlying causal relationship between data entities.