 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpretable Goal-Based model for Vehicle Trajectory Prediction in Interactive Scenarios
Aug 08, 2023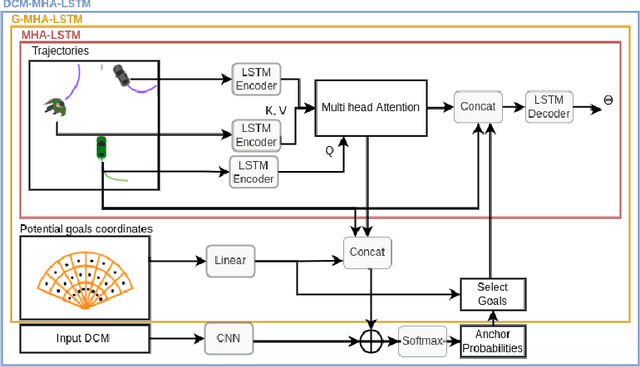
The abilities to understand the social interaction behaviors between a vehicle and its surroundings while predicting its trajectory in an urban environment are critical for road safety in autonomous driving. Social interactions are hard to explain because of their uncertainty. In recent years, neural network-based methods have been widely used for trajectory prediction and have been shown to outperform hand-crafted methods. However, these methods suffer from their lack of interpretability. In order to overcome this limitation, we combine the interpretability of a discrete choice model with the high accuracy of a neural network-based model for the task of vehicle trajectory prediction in an interactive environment. We implement and evaluate our model using the INTERACTION dataset and demonstrate the effectiveness of our proposed architecture to explain its predictions without compromising the accuracy.
3D Semantic Scene Completion: a Survey
Mar 12, 2021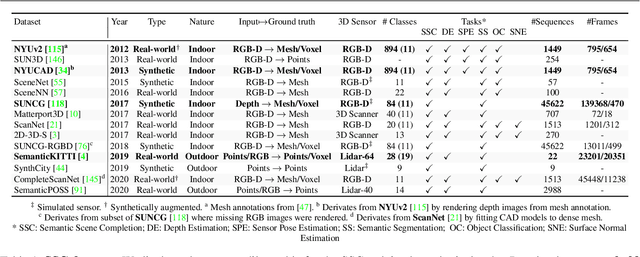

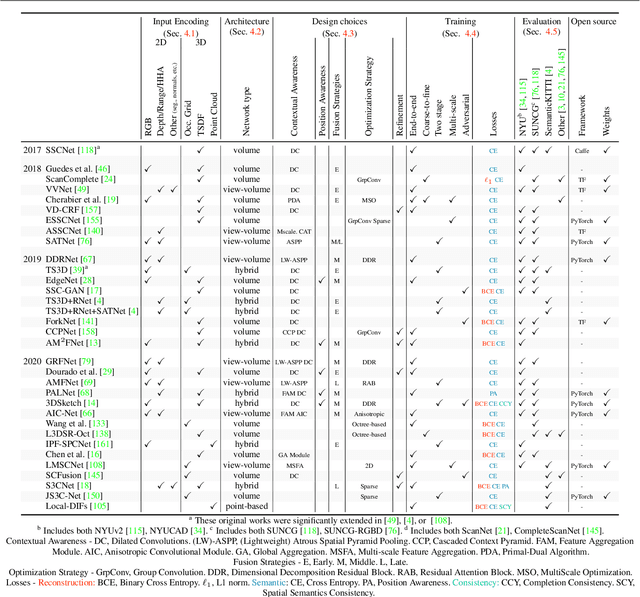

Semantic Scene Completion (SSC) aims to jointly estimate the complete geometry and semantics of a scene, assuming partial sparse input. In the last years following the multiplication of large-scale 3D datasets, SSC has gained significant momentum in the research community because it holds unresolved challenges. Specifically, SSC lies in the ambiguous completion of large unobserved areas and the weak supervision signal of the ground truth. This led to a substantially increasing number of papers on the matter. This survey aims to identify, compare and analyze the techniques providing a critical analysis of the SSC literature on both methods and datasets. Throughout the paper, we provide an in-depth analysis of the existing works covering all choices made by the authors while highlighting the remaining avenues of research. SSC performance of the SoA on the most popular datasets is also evaluated and analyzed.
LMSCNet: Lightweight Multiscale 3D Semantic Completion
Aug 24, 2020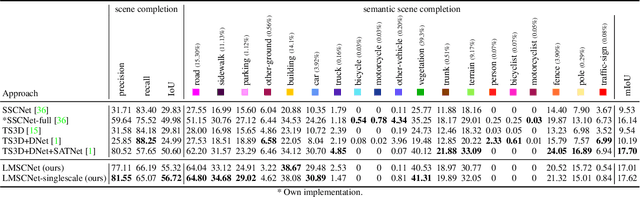
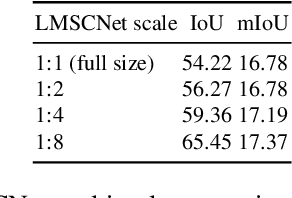
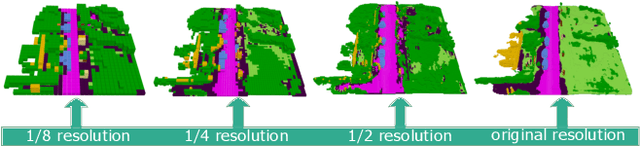
We introduce a new approach for multiscale 3D semantic scene completion from sparse 3D occupancy grid like voxelized LiDAR scans. As opposed to the literature, we use a 2D UNet backbone with comprehensive multiscale skip connections to enhance feature flow, along with 3D segmentation heads. On the SemanticKITTI benchmark, our method performs on par on semantic completion and better on completion than all other published methods - while being significantly lighter and faster. As such it provides a great performance/speed trade-off for mobile-robotics applications. The ablation studies demonstrate our method is robust to lower density inputs, and that it enables very high speed semantic completion at the coarsest level. Qualitative results of our approach are provided at http://tiny.cc/lmscnet.
3D Surface Reconstruction from Voxel-based Lidar Data
Jun 25, 2019
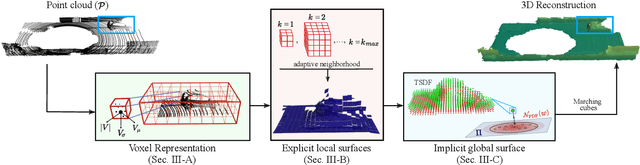
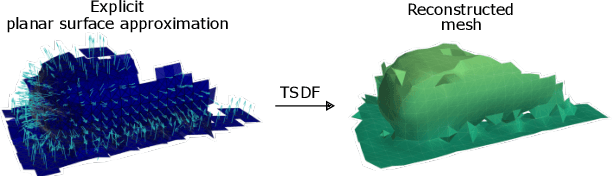
To achieve fully autonomous navigation, vehicles need to compute an accurate model of their direct surrounding. In this paper, a 3D surface reconstruction algorithm from heterogeneous density 3D data is presented. The proposed method is based on a TSDF voxel-based representation, where an adaptive neighborhood kernel sourced on a Gaussian confidence evaluation is introduced. This enables to keep a good trade-off between the density of the reconstructed mesh and its accuracy. Experimental evaluations carried on both synthetic (CARLA) and real (KITTI) 3D data show a good performance compared to a state of the art method used for surface reconstruction.
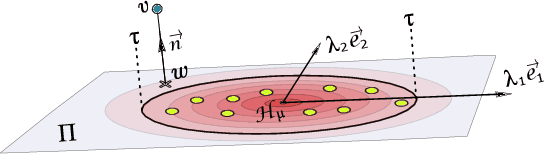
A Statistical Update of Grid Representations from Range Sensors
Jul 23, 2018
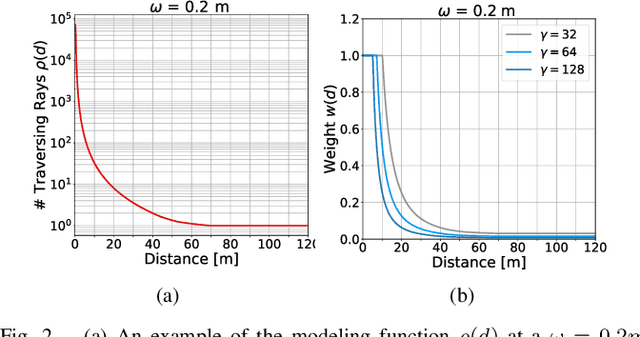
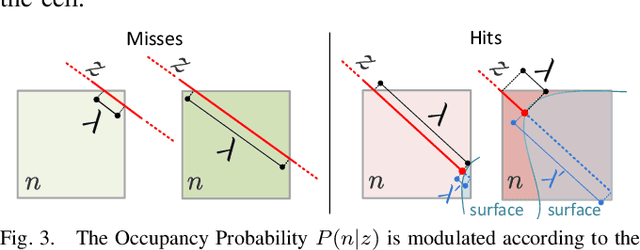
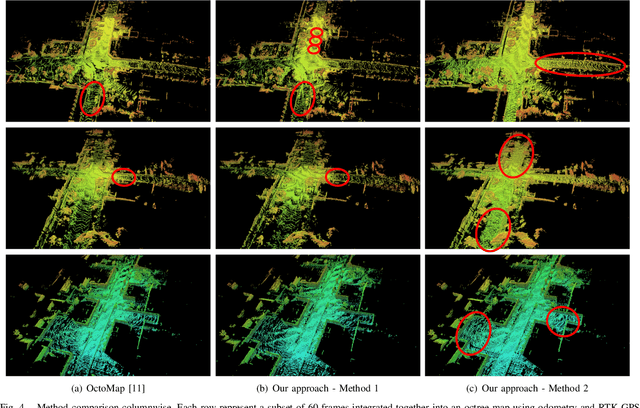
In a wide range of robotic applications, being able to create a 3D model of the surrounding environment is a key feature for autonomous tasks. In this research report, we present a statistical model to perform 3D reconstructions of the environment from range sensors using an occupancy grid. To do so, we take into account all the available information obtained from the sensor, considering the distances traversed by the rays in each cell and seeking to reduce reconstruction errors caused by discretization. The approach has been validated qualitatively using the KITTI dataset.