 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Supervised One-Shot Learning for Automatic Segmentation of StyleGAN Images
Mar 17, 2023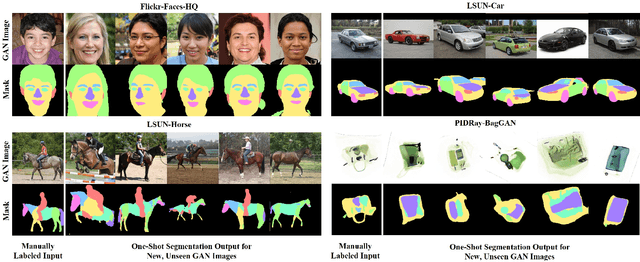
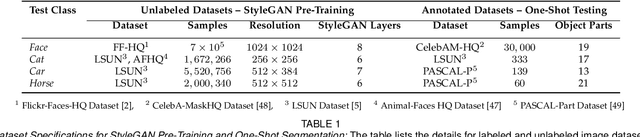
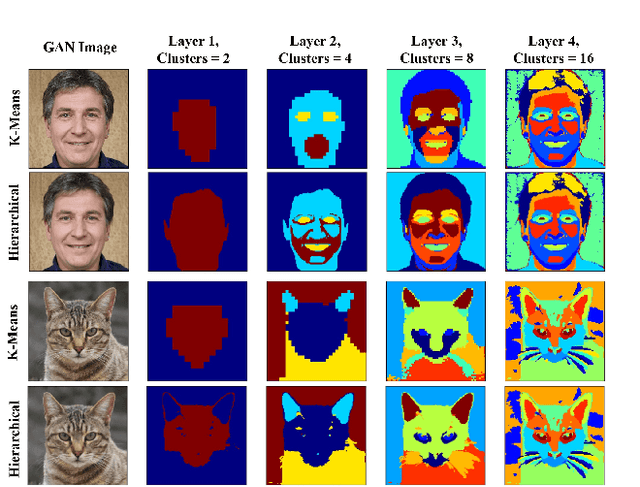
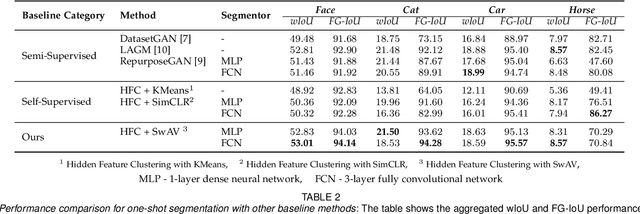
We propose a framework for the automatic one-shot segmentation of synthetic images generated by a StyleGAN. Our framework is based on the observation that the multi-scale hidden features in the GAN generator hold useful semantic information that can be utilized for automatic on-the-fly segmentation of the generated images. Using these features, our framework learns to segment synthetic images using a self-supervised contrastive clustering algorithm that projects the hidden features into a compact space for per-pixel classification. This novel contrastive learner is based on using a pixel-wise swapped prediction loss for image segmentation that leads to faster learning of the feature vectors for one-shot segmentation. We have tested our implementation on a number of standard benchmarks to yield a segmentation performance that not only outperforms the semi-supervised baseline methods by an average wIoU margin of 1.02% but also improves the inference speeds by a factor of 4.5. Finally, we also show the results of using the proposed one-shot learner in implementing BagGAN, a framework for producing annotated synthetic baggage X-ray scans for threat detection. This framework was trained and tested on the PIDRay baggage benchmark to yield a performance comparable to its baseline segmenter based on manual annotations.
A Splitting-Based Iterative Algorithm for GPU-Accelerated Statistical Dual-Energy X-Ray CT Reconstruction
May 02, 2019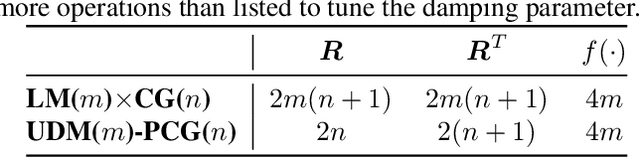
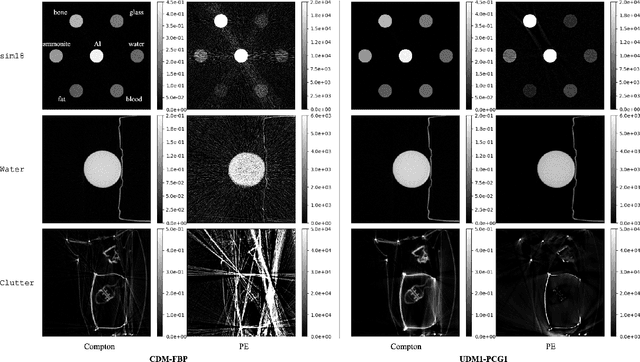
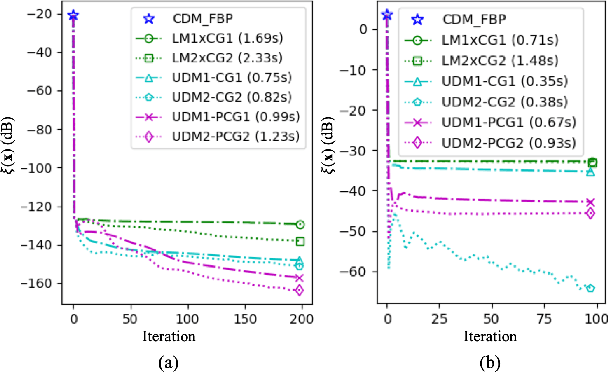
When dealing with material classification in baggage at airports, Dual-Energy Computed Tomography (DECT) allows characterization of any given material with coefficients based on two attenuative effects: Compton scattering and photoelectric absorption. However, straightforward projection-domain decomposition methods for this characterization often yield poor reconstructions due to the high dynamic range of material properties encountered in an actual luggage scan. Hence, for better reconstruction quality under a timing constraint, we propose a splitting-based, GPU-accelerated, statistical DECT reconstruction algorithm. Compared to prior art, our main contribution lies in the significant acceleration made possible by separating reconstruction and decomposition within an ADMM framework. Experimental results, on both synthetic and real-world baggage phantoms, demonstrate a significant reduction in time required for convergence.
Adaptive Target Recognition: A Case Study Involving Airport Baggage Screening
Nov 30, 2018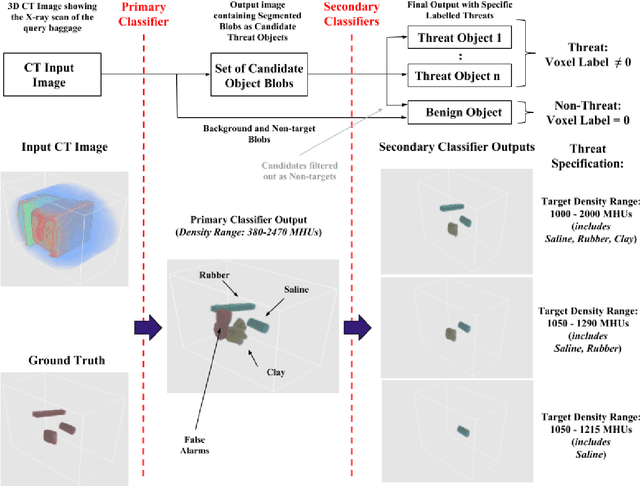
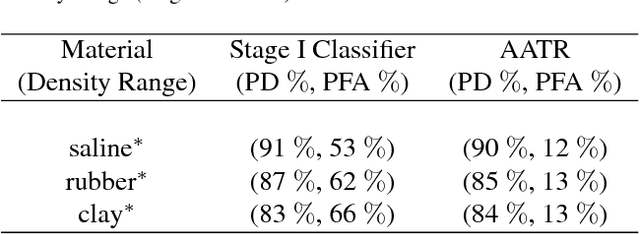
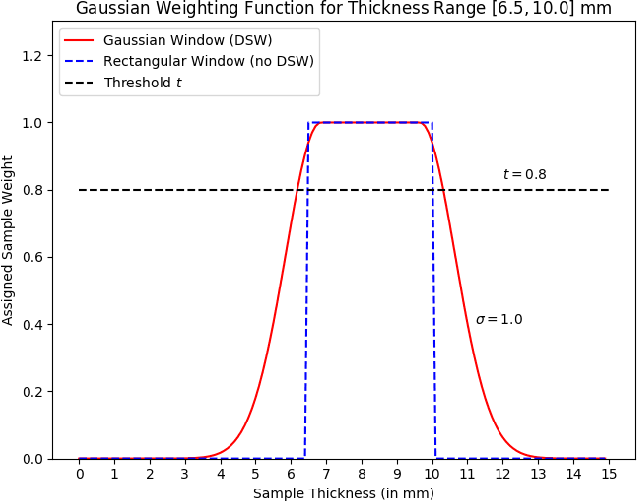
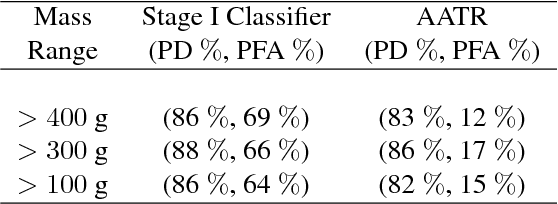
This work addresses the question whether it is possible to design a computer-vision based automatic threat recognition (ATR) system so that it can adapt to changing specifications of a threat without having to create a new ATR each time. The changes in threat specifications, which may be warranted by intelligence reports and world events, are typically regarding the physical characteristics of what constitutes a threat: its material composition, its shape, its method of concealment, etc. Here we present our design of an AATR system (Adaptive ATR) that can adapt to changing specifications in materials characterization (meaning density, as measured by its x-ray attenuation coefficient), its mass, and its thickness. Our design uses a two-stage cascaded approach, in which the first stage is characterized by a high recall rate over the entire range of possibilities for the threat parameters that are allowed to change. The purpose of the second stage is to then fine-tune the performance of the overall system for the current threat specifications. The computational effort for this fine-tuning for achieving a desired PD/PFA rate is far less than what it would take to create a new classifier with the same overall performance for the new set of threat specifications.
SLAM-Assisted Coverage Path Planning for Indoor LiDAR Mapping Systems
Nov 12, 2018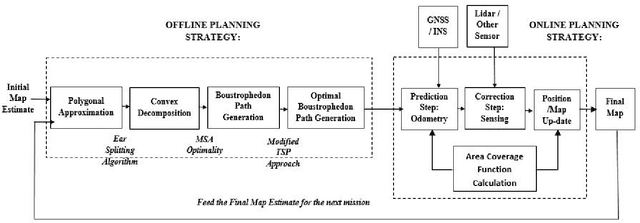
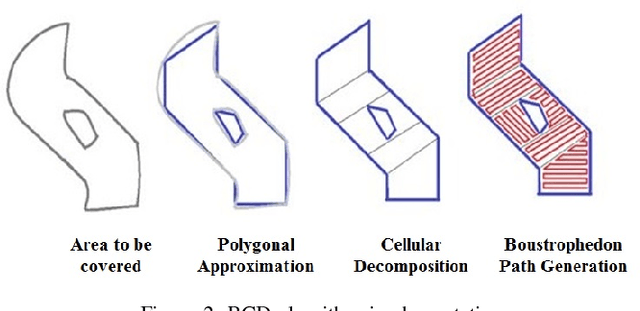
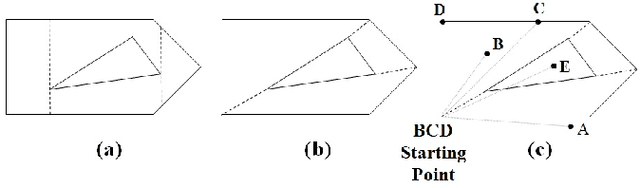
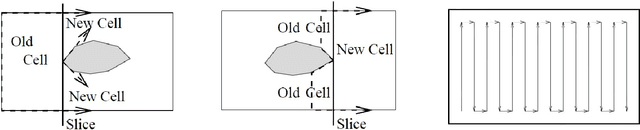
Applications involving autonomous navigation and planning of mobile agents can benefit greatly by employing online Simultaneous Localization and Mapping (SLAM) techniques, however, their proper implementation still warrants an efficient amalgamation with any offline path planning method that may be used for the particular application. In this paper, such a case of amalgamation is considered for a LiDAR-based indoor mapping system which presents itself as a 2D coverage path planning problem implemented along with online SLAM. This paper shows how classic offline Coverage Path Planning (CPP) can be altered for use with online SLAM by proposing two modifications: (i) performing convex decomposition of the polygonal coverage area to allow for an arbitrary choice of an initial point while still tracing the shortest coverage path and (ii) using a new approach to stitch together the different cells within the polygonal area to form a continuous coverage path. Furthermore, an alteration to the SLAM operation to suit the coverage path planning strategy is also made that evaluates navigation errors in terms of an area coverage cost function. The implementation results show how the combination of the two modified offline and online planning strategies allow for an improvement in the total area coverage by the mapping system - the modification thus presents an approach for modifying offline and online navigation strategies for robust operation.
Optimal Control for Constrained Coverage Path Planning
Aug 10, 2017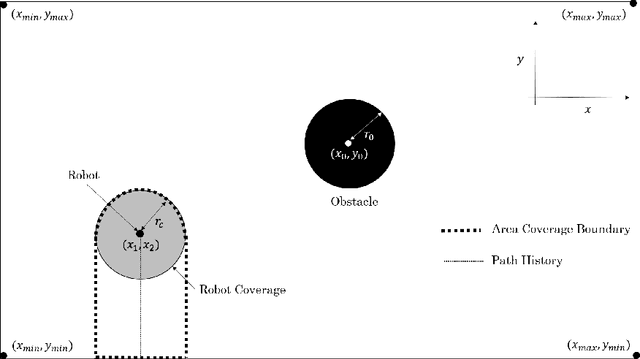
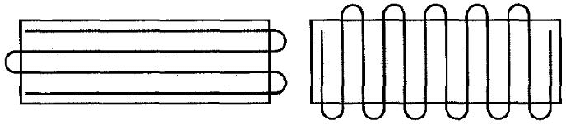
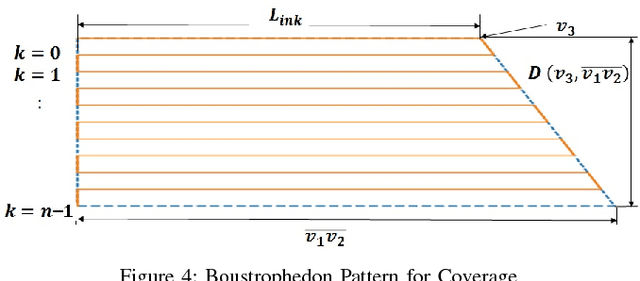
The problem of constrained coverage path planning involves a robot trying to cover maximum area of an environment under some constraints that appear as obstacles in the map. Out of the several coverage path planning methods, we consider augmenting the linear sweep-based coverage method to achieve minimum energy/ time optimality along with maximum area coverage. In addition, we also study the effects of variation of different parameters on the performance of the modified method.