 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntention estimation from gaze and motion features for human-robot shared-control object manipulation
Aug 18, 2022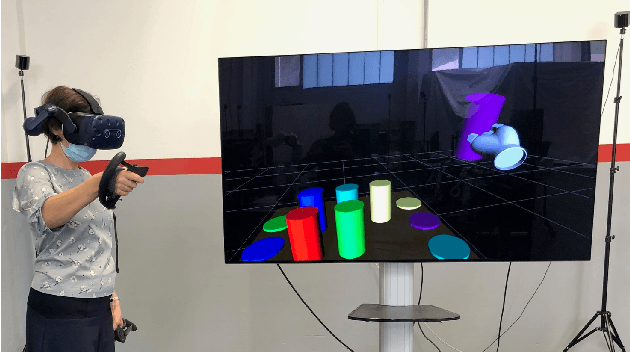
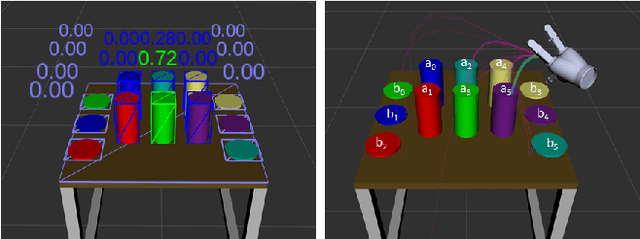
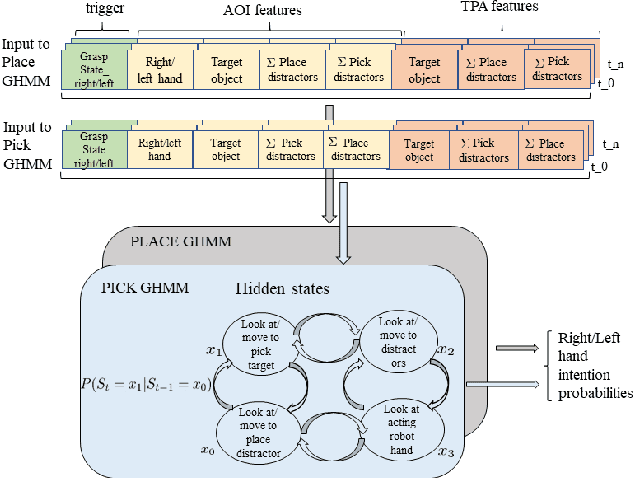
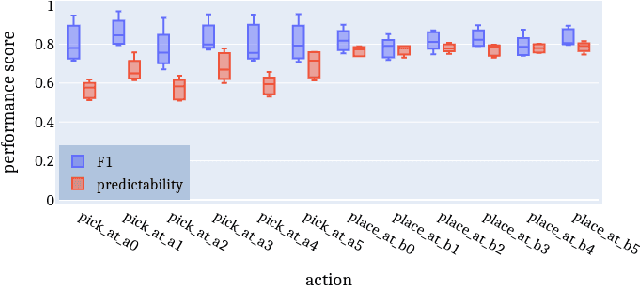
Shared control can help in teleoperated object manipulation by assisting with the execution of the user's intention. To this end, robust and prompt intention estimation is needed, which relies on behavioral observations. Here, an intention estimation framework is presented, which uses natural gaze and motion features to predict the current action and the target object. The system is trained and tested in a simulated environment with pick and place sequences produced in a relatively cluttered scene and with both hands, with possible hand-over to the other hand. Validation is conducted across different users and hands, achieving good accuracy and earliness of prediction. An analysis of the predictive power of single features shows the predominance of the grasping trigger and the gaze features in the early identification of the current action. In the current framework, the same probabilistic model can be used for the two hands working in parallel and independently, while a rule-based model is proposed to identify the resulting bimanual action. Finally, limitations and perspectives of this approach to more complex, full-bimanual manipulations are discussed.