 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisentangling the Power Dynamics in Participatory Data Physicalisation
Mar 17, 2025Participatory data physicalisation (PDP) is recognised for its potential to support data-driven decisions among stakeholders who collaboratively construct physical elements into commonly insightful visualisations. Like all participatory processes, PDP is however influenced by underlying power dynamics that might lead to issues regarding extractive participation, marginalisation, or exclusion, among others. We first identified the decisions behind these power dynamics by developing an ontology that synthesises critical theoretical insights from both visualisation and participatory design research, which were then systematically applied unto a representative corpus of 23 PDP artefacts. By revealing how shared decisions are guided by different agendas, this paper presents three contributions: 1) a cross-disciplinary ontology that facilitates the systematic analysis of existing and novel PDP artefacts and processes; which leads to 2) six PDP agendas that reflect the key power dynamics in current PDP practice, revealing the diversity of orientations towards stakeholder participation in PDP practice; and 3) a set of critical considerations that should guide how power dynamics can be balanced, such as by reflecting on how issues are represented, data is contextualised, participants express their meanings, and how participants can dissent with flexible artefact construction. Consequently, this study advances a feminist research agenda by guiding researchers and practitioners in openly reflecting on and sharing responsibilities in data physicalisation and participatory data visualisation.
Eliciting Understandable Architectonic Gestures for Robotic Furniture through Co-Design Improvisation
Jan 03, 2025

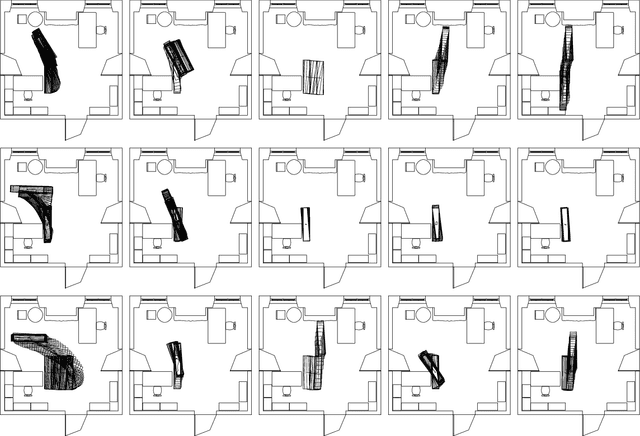

The vision of adaptive architecture proposes that robotic technologies could enable interior spaces to physically transform in a bidirectional interaction with occupants. Yet, it is still unknown how this interaction could unfold in an understandable way. Inspired by HRI studies where robotic furniture gestured intents to occupants by deliberately positioning or moving in space, we hypothesise that adaptive architecture could also convey intents through gestures performed by a mobile robotic partition. To explore this design space, we invited 15 multidisciplinary experts to join co-design improvisation sessions, where they manually manoeuvred a deactivated robotic partition to design gestures conveying six architectural intents that varied in purpose and urgency. Using a gesture elicitation method alongside motion-tracking data, a Laban-based questionnaire, and thematic analysis, we identified 20 unique gestural strategies. Through categorisation, we introduced architectonic gestures as a novel strategy for robotic furniture to convey intent by indexically leveraging its spatial impact, complementing the established deictic and emblematic gestures. Our study thus represents an exploratory step toward making the autonomous gestures of adaptive architecture more legible. By understanding how robotic gestures are interpreted based not only on their motion but also on their spatial impact, we contribute to bridging HRI with Human-Building Interaction research.
Research Challenges for Adaptive Architecture: Empowering Occupants of Multi-Occupancy Buildings
Mar 25, 2024
This positional paper outlines our vision of 'adaptive architecture', which involves the integration of robotic technology to physically change an architectural space in supporting the changing needs of its occupants, in response to the CHI'24 workshop "HabiTech - Inhabiting Buildings, Data & Technology" call on "How do new technologies enable and empower the inhabitants of multi-occupancy buildings?". Specifically, while adaptive architecture holds promise for enhancing occupant satisfaction, comfort, and overall health and well-being, there remains a range of research challenges of (1) how it can effectively support individual occupants, while (2) mediating the conflicting needs of collocated others, and (3) integrating meaningfully into the sociocultural characteristics of their building community.
Technical Development of a Semi-Autonomous Robotic Partition
Mar 25, 2024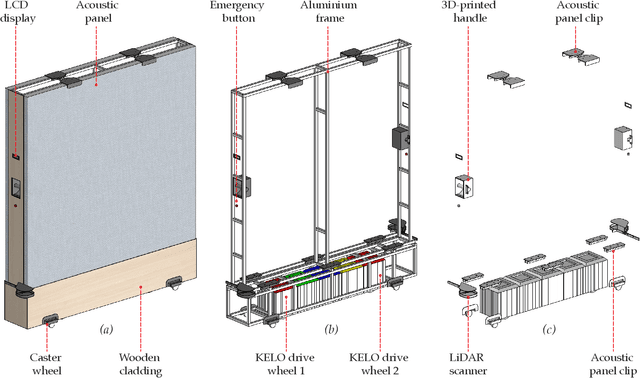



This technical description details the design and engineering process of a semi-autonomous robotic partition. This robotic partition prototype was subsequently employed in a longer-term evaluation in-the-wild study conducted by the authors in a real-world office setting.
The Adaptive Workplace: Orchestrating Architectural Services around the Wellbeing of Individual Occupants
Mar 25, 2024
As the academic consortia members of the EU Horizon project SONATA ("Situation-aware OrchestratioN of AdapTive Architecture"), we respond to the workshop call for "Office Wellbeing by Design: Don't Stand for Anything Less" by proposing the "Adaptive Workplace" concept. In essence, our vision aims to adapt a workplace to the ever-changing needs of individual occupants, instead of that occupants are expected to adapt to their workplace.
The Adaptive Architectural Layout: How the Control of a Semi-Autonomous Mobile Robotic Partition was Shared to Mediate the Environmental Demands and Resources of an Open-Plan Office
Jan 25, 2024



A typical open-plan office layout is unable to optimally host multiple collocated work activities, personal needs, and situational events, as its space exerts a range of environmental demands on workers in terms of maintaining their acoustic, visual or privacy comfort. As we hypothesise that these demands could be coped by optimising the environmental resources of the architectural layout, we deployed a mobile robotic partition that autonomously manoeuvres between predetermined locations. During a five-weeks in-the-wild study within a real-world open-plan office, we studied how 13 workers adopted four distinct adaptation strategies when sharing the spatiotemporal control of the robotic partition. Based on their logged and self-reported reasoning, we present six initiation regulating factors that determine the appropriateness of each adaptation strategy. This study thus contributes to how future human-building interaction could autonomously improve the experience, comfort, performance, and even the health and wellbeing of multiple workers that share the same workplace.
Towards Designing Spatial Robots that are Architecturally Motivated
Nov 27, 2023While robots are increasingly integrated into the built environment, little is known how their qualities can meaningfully influence our spaces to facilitate enjoyable and agreeable interaction, rather than robotic settings that are driven by functional goals. Motivated by the premise that future robots should be aware of architectural sensitivities, we developed a set of exploratory studies that combine methods from both architectural and interaction design. While we empirically discovered that dynamically moving spatial elements, which we coin as spatial robots, can indeed create unique life-sized affordances that encourage or resist human activities, we also encountered many unforeseen design challenges originated from how ordinary users and experts perceived spatial robots. This discussion thus could inform similar design studies in the areas of human-building architecture (HBI) or responsive and interactive architecture.