 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArchitectural HRI: Towards a Robotic Paradigm Shift in Human-Building Interaction
Mar 03, 2026Recent advances in sensing, communication, interfaces, control, and robotics are expanding Human-Building Interaction (HBI) beyond adaptive building services and facades toward the physical actuation of architectural space. In parallel, research in robotic furniture, swarm robotics, and shape-changing spaces shows that architectural elements can now be robotically augmented to move, reconfigure, and adapt space. We propose that these advances promise a paradigm shift in HBI, in which multiple building layers physically adapt in synchrony to support occupant needs and sustainability goals more holistically. Conversely, we argue that this emerging paradigm also provides an ideal case for transferring HRI knowledge to unconventional robotic morphologies, including the interpretation of the robot as multiple architectural layers or even as a building. However, this research agenda remains challenged by the temporal, spatial, and social complexity of architectural HRI, and by fragmented knowledge across HCI, environmental psychology, cognitive science, and architecture. We therefore call for interdisciplinary research that unifies the why, what, and how of robotic actuation in architectural forms.
Eliciting Understandable Architectonic Gestures for Robotic Furniture through Co-Design Improvisation
Jan 03, 2025

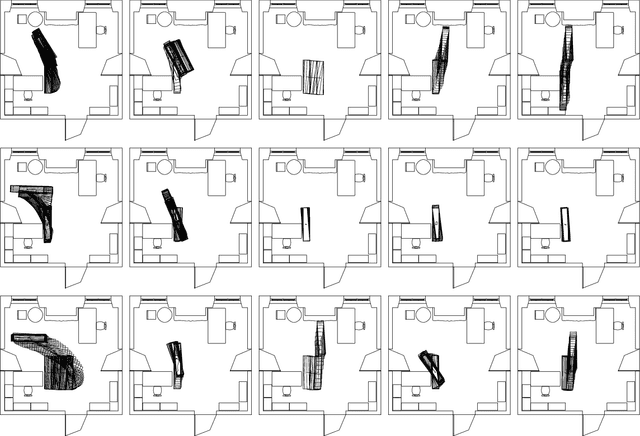

The vision of adaptive architecture proposes that robotic technologies could enable interior spaces to physically transform in a bidirectional interaction with occupants. Yet, it is still unknown how this interaction could unfold in an understandable way. Inspired by HRI studies where robotic furniture gestured intents to occupants by deliberately positioning or moving in space, we hypothesise that adaptive architecture could also convey intents through gestures performed by a mobile robotic partition. To explore this design space, we invited 15 multidisciplinary experts to join co-design improvisation sessions, where they manually manoeuvred a deactivated robotic partition to design gestures conveying six architectural intents that varied in purpose and urgency. Using a gesture elicitation method alongside motion-tracking data, a Laban-based questionnaire, and thematic analysis, we identified 20 unique gestural strategies. Through categorisation, we introduced architectonic gestures as a novel strategy for robotic furniture to convey intent by indexically leveraging its spatial impact, complementing the established deictic and emblematic gestures. Our study thus represents an exploratory step toward making the autonomous gestures of adaptive architecture more legible. By understanding how robotic gestures are interpreted based not only on their motion but also on their spatial impact, we contribute to bridging HRI with Human-Building Interaction research.