 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Stochastic Optimal Control for Multi-agent Quadrotor Systems
Mar 10, 2016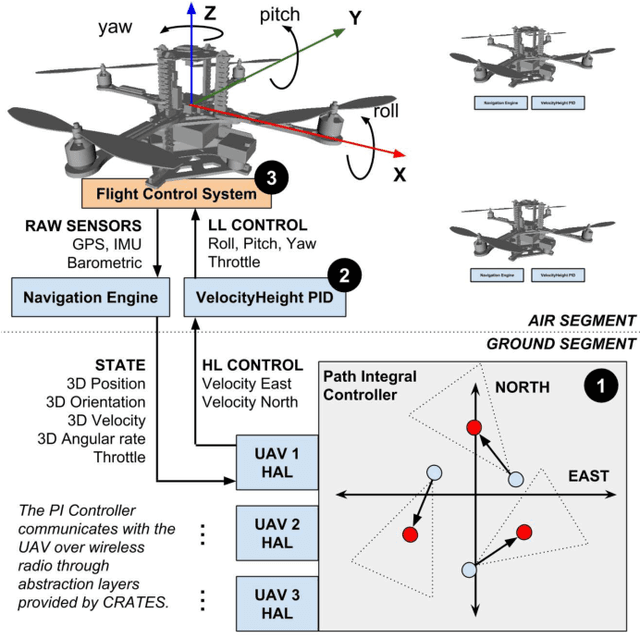
This paper presents a novel method for controlling teams of unmanned aerial vehicles using Stochastic Optimal Control (SOC) theory. The approach consists of a centralized high-level planner that computes optimal state trajectories as velocity sequences, and a platform-specific low-level controller which ensures that these velocity sequences are met. The planning task is expressed as a centralized path-integral control problem, for which optimal control computation corresponds to a probabilistic inference problem that can be solved by efficient sampling methods. Through simulation we show that our SOC approach (a) has significant benefits compared to deterministic control and other SOC methods in multimodal problems with noise-dependent optimal solutions, (b) is capable of controlling a large number of platforms in real-time, and (c) yields collective emergent behaviour in the form of flight formations. Finally, we show that our approach works for real platforms, by controlling a team of three quadrotors in outdoor conditions.