Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuori: A Community-Informed Design of a Socially Interactive Humanoid Robot
Sep 02, 2021
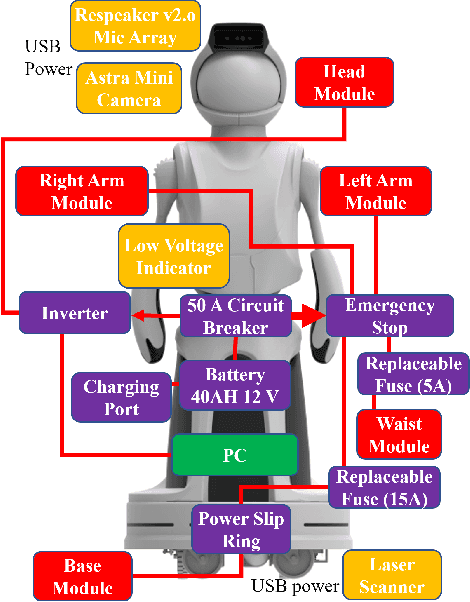
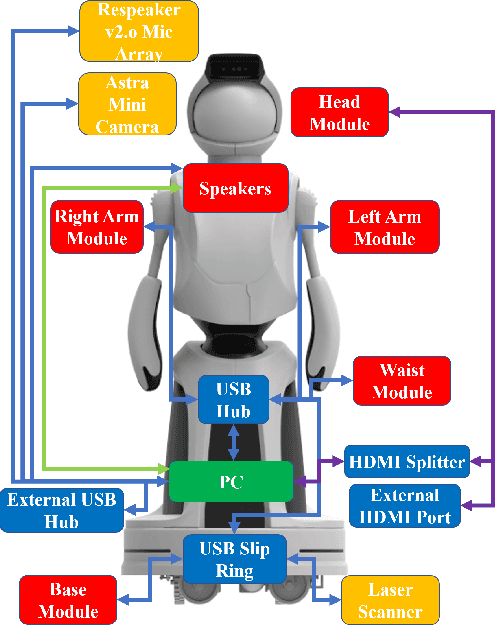
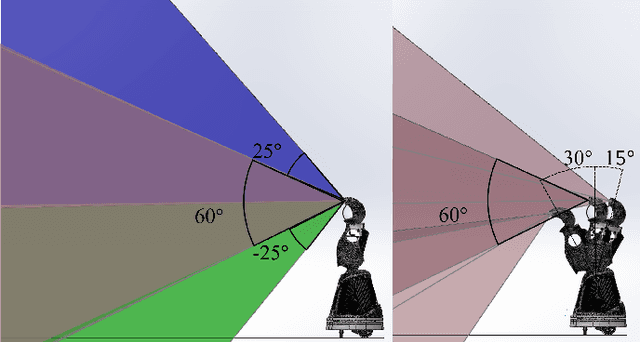
Hardware platforms for socially interactive robotics can be limited by cost or lack of functionality. This paper presents the overall system -- design, hardware, and software -- for Quori, a novel, affordable, socially interactive humanoid robot platform for facilitating non-contact human-robot interaction (HRI) research. The design of the system is motivated by feedback sampled from the HRI research community. The overall design maintains a balance of affordability and functionality. Initial Quori testing and a six-month deployment are presented. Ten Quori platforms have been awarded to a diverse group of researchers from across the United States to facilitate HRI research to build a community database from a common platform.
* 20 pages. 21 figures. This was accepted to and will be published to
the IEEE Transactions on Robotics Journal
Via