 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeneralized Convolutional Neural Networks for Point Cloud Data
Oct 19, 2018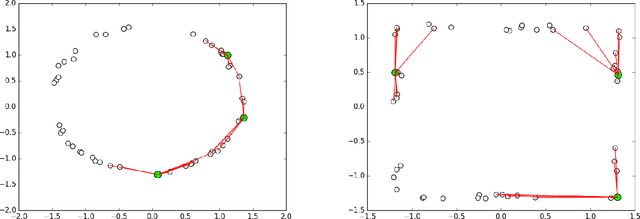
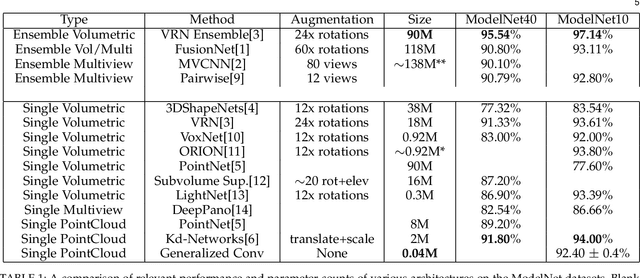

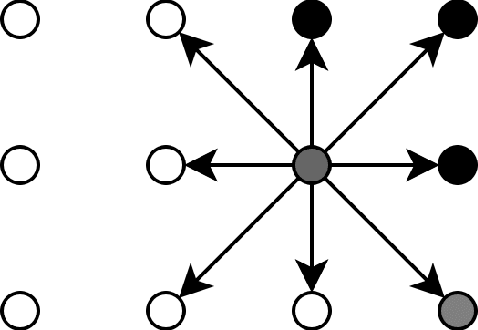
The introduction of cheap RGB-D cameras, stereo cameras, and LIDAR devices has given the computer vision community 3D information that conventional RGB cameras cannot provide. This data is often stored as a point cloud. In this paper, we present a novel method to apply the concept of convolutional neural networks to this type of data. By creating a mapping of nearest neighbors in a dataset, and individually applying weights to spatial relationships between points, we achieve an architecture that works directly with point clouds, but closely resembles a convolutional neural net in both design and behavior. Such a method bypasses the need for extensive feature engineering, while proving to be computationally efficient and requiring few parameters.
Low-Rank Approximations for Conditional Feedforward Computation in Deep Neural Networks
Jan 28, 2014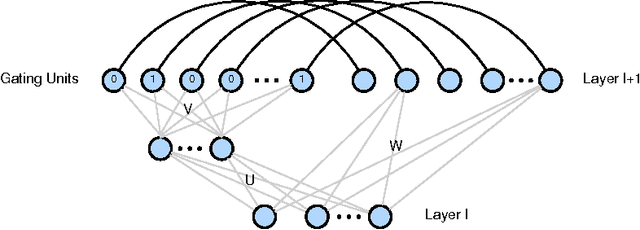
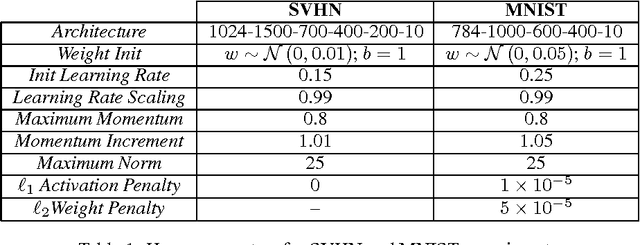
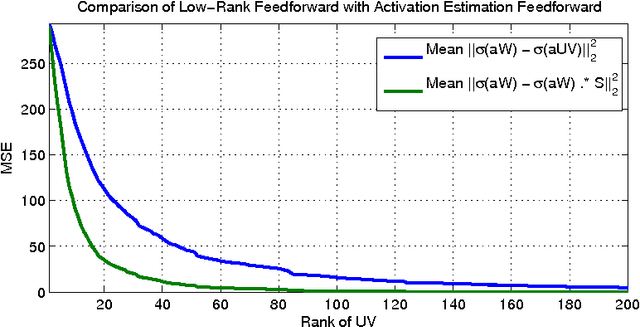
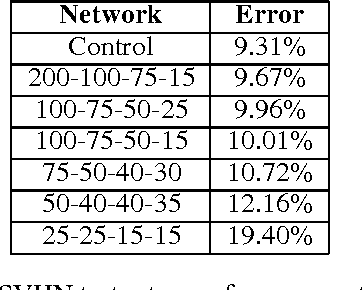
Scalability properties of deep neural networks raise key research questions, particularly as the problems considered become larger and more challenging. This paper expands on the idea of conditional computation introduced by Bengio, et. al., where the nodes of a deep network are augmented by a set of gating units that determine when a node should be calculated. By factorizing the weight matrix into a low-rank approximation, an estimation of the sign of the pre-nonlinearity activation can be efficiently obtained. For networks using rectified-linear hidden units, this implies that the computation of a hidden unit with an estimated negative pre-nonlinearity can be ommitted altogether, as its value will become zero when nonlinearity is applied. For sparse neural networks, this can result in considerable speed gains. Experimental results using the MNIST and SVHN data sets with a fully-connected deep neural network demonstrate the performance robustness of the proposed scheme with respect to the error introduced by the conditional computation process.