 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimization and Interpretability of Graph Attention Networks for Small Sparse Graph Structures in Automotive Applications
May 25, 2023For automotive applications, the Graph Attention Network (GAT) is a prominently used architecture to include relational information of a traffic scenario during feature embedding. As shown in this work, however, one of the most popular GAT realizations, namely GATv2, has potential pitfalls that hinder an optimal parameter learning. Especially for small and sparse graph structures a proper optimization is problematic. To surpass limitations, this work proposes architectural modifications of GATv2. In controlled experiments, it is shown that the proposed model adaptions improve prediction performance in a node-level regression task and make it more robust to parameter initialization. This work aims for a better understanding of the attention mechanism and analyzes its interpretability of identifying causal importance.
A Multidimensional Graph Fourier Transformation Neural Network for Vehicle Trajectory Prediction
May 12, 2023



This work introduces the multidimensional Graph Fourier Transformation Neural Network (GFTNN) for long-term trajectory predictions on highways. Similar to Graph Neural Networks (GNNs), the GFTNN is a novel network architecture that operates on graph structures. While several GNNs lack discriminative power due to suboptimal aggregation schemes, the proposed model aggregates scenario properties through a powerful operation: the multidimensional Graph Fourier Transformation (GFT). The spatio-temporal vehicle interaction graph of a scenario is converted into a spectral scenario representation using the GFT. This beneficial representation is input to the prediction framework composed of a neural network and a descriptive decoder. Even though the proposed GFTNN does not include any recurrent element, it outperforms state-of-the-art models in the task of highway trajectory prediction. For experiments and evaluation, the publicly available datasets highD and NGSIM are used
Gradient Derivation for Learnable Parameters in Graph Attention Networks
Apr 21, 2023

This work provides a comprehensive derivation of the parameter gradients for GATv2 [4], a widely used implementation of Graph Attention Networks (GATs). GATs have proven to be powerful frameworks for processing graph-structured data and, hence, have been used in a range of applications. However, the achieved performance by these attempts has been found to be inconsistent across different datasets and the reasons for this remains an open research question. As the gradient flow provides valuable insights into the training dynamics of statistically learning models, this work obtains the gradients for the trainable model parameters of GATv2. The gradient derivations supplement the efforts of [2], where potential pitfalls of GATv2 are investigated.
Variational Autoencoder-Based Vehicle Trajectory Prediction with an Interpretable Latent Space
Mar 25, 2021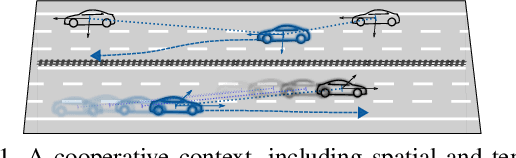
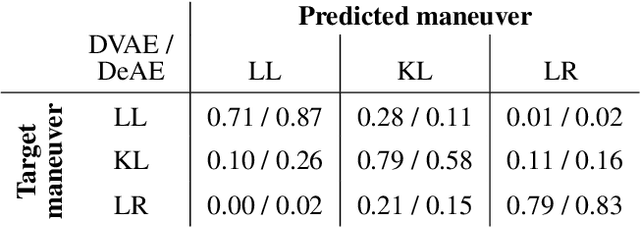
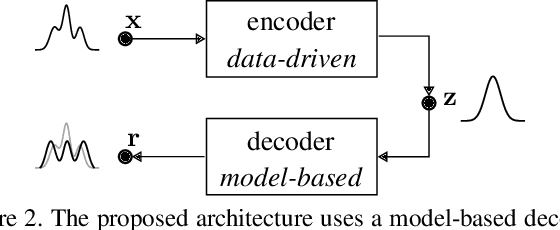
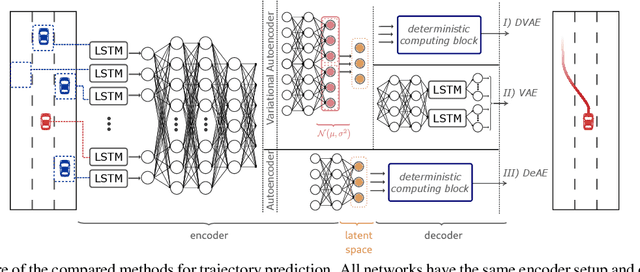
This paper introduces the Descriptive Variational Autoencoder (DVAE), an unsupervised and end-to-end trainable neural network for predicting vehicle trajectories that provides partial interpretability. The novel approach is based on the architecture and objective of common variational autoencoders. By introducing expert knowledge within the decoder part of the autoencoder, the encoder learns to extract latent parameters that provide a graspable meaning in human terms. Such an interpretable latent space enables the validation by expert defined rule sets. The evaluation of the DVAE is performed using the publicly available highD dataset for highway traffic scenarios. In comparison to a conventional variational autoencoder with equivalent complexity, the proposed model provides a similar prediction accuracy but with the great advantage of having an interpretable latent space. For crucial decision making and assessing trustworthiness of a prediction this property is highly desirable.