 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-aware Contact-safe Model-based Reinforcement Learning
Oct 16, 2020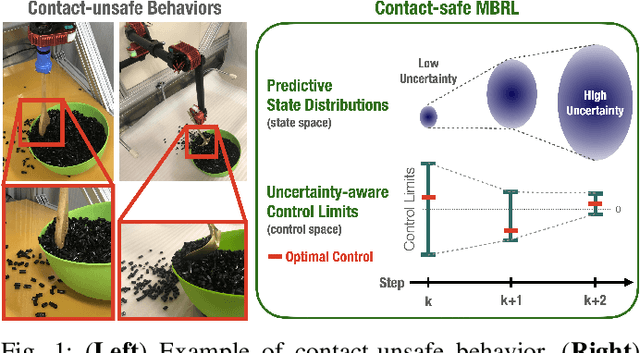
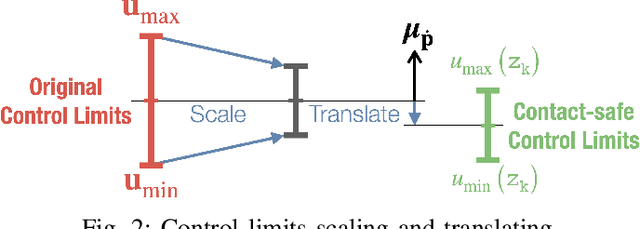
This paper presents contact-safe Model-based Reinforcement Learning (MBRL) for robot applications that achieves contact-safe behaviors in the learning process. In typical MBRL, we cannot expect the data-driven model to generate accurate and reliable policies to the intended robotic tasks during the learning process due to data scarcity. Operating these unreliable policies in a contact-rich environment could cause damage to the robot and its surroundings. To alleviate the risk of causing damage through unexpected intensive physical contacts, we present the contact-safe MBRL that associates the probabilistic Model Predictive Control's (pMPC) control limits with the model uncertainty so that the allowed acceleration of controlled behavior is adjusted according to learning progress. Control planning with such uncertainty-aware control limits is formulated as a deterministic MPC problem using a computationally-efficient approximated GP dynamics and an approximated inference technique. Our approach's effectiveness is evaluated through bowl mixing tasks with simulated and real robots, scooping tasks with a real robot as examples of contact-rich manipulation skills. (video: https://youtu.be/8uTDYYUKeFM)