Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChallenges in Visual Anomaly Detection for Mobile Robots
Sep 22, 2022
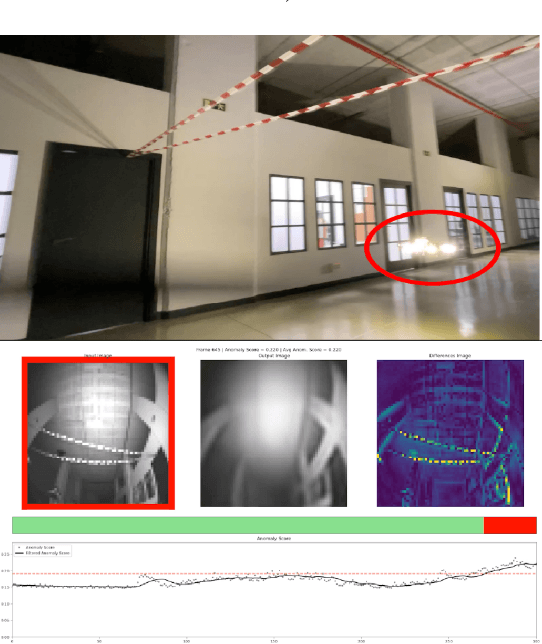
We consider the task of detecting anomalies for autonomous mobile robots based on vision. We categorize relevant types of visual anomalies and discuss how they can be detected by unsupervised deep learning methods. We propose a novel dataset built specifically for this task, on which we test a state-of-the-art approach; we finally discuss deployment in a real scenario.
* Workshop paper presented at the ICRA 2022 Workshop on Safe and
Reliable Robot Autonomy under Uncertainty
https://sites.google.com/umich.edu/saferobotautonomy/home
Via