 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTuneNet: One-Shot Residual Tuning for System Identification and Sim-to-Real Robot Task Transfer
Jul 25, 2019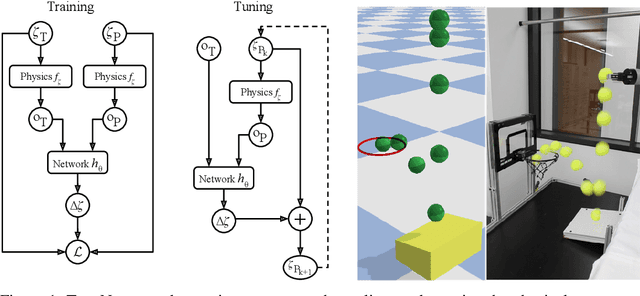
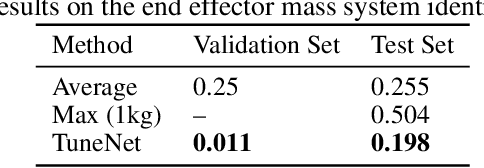
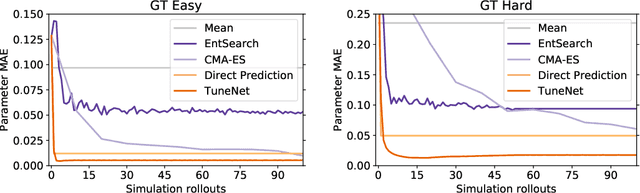
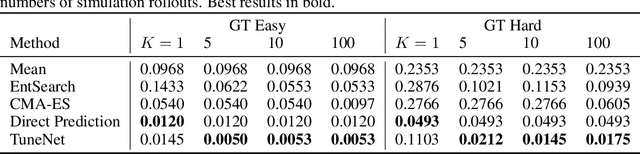
As researchers teach robots to perform more and more complex tasks, the need for realistic simulation environments is growing. Existing techniques for closing the reality gap by approximating real-world physics often require extensive real world data and/or thousands of simulation samples. This paper presents TuneNet, a new machine learning-based method to directly tune the parameters of one model to match another using an $\textit{iterative residual tuning}$ technique. TuneNet estimates the parameter difference between two models using a single observation from the target and minimal simulation, allowing rapid, accurate and sample-efficient parameter estimation. The system can be trained via supervised learning over an auto-generated simulated dataset. We show that TuneNet can perform system identification, even when the true parameter values lie well outside the distribution seen during training, and demonstrate that simulators tuned with TuneNet outperform existing techniques for predicting rigid body motion. Finally, we show that our method can estimate real-world parameter values, allowing a robot to perform sim-to-real task transfer on a dynamic manipulation task unseen during training. We are also making a baseline implementation of our code available online.
Towards Online Learning from Corrective Demonstrations
Oct 02, 2018
Robots operating in real-world human environments will likely encounter task execution failures. To address this, we would like to allow co-present humans to refine the robot's task model as errors are encountered. Existing approaches to task model modification require reasoning over the entire dataset and model, limiting the rate of corrective updates. We introduce the State-Indexed Task Updates (SITU) algorithm to efficiently incorporate corrective demonstrations into an existing task model by iteratively making local updates that only require reasoning over a small subset of the model. In future work, we will evaluate this approach with a user study.