 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRandom Fourier Features based SLAM
Nov 01, 2020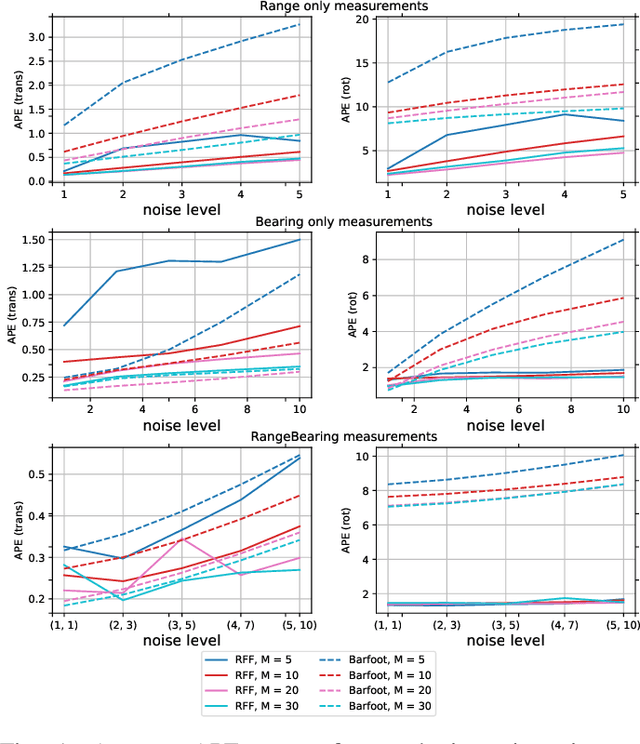
This work is dedicated to simultaneous continuous-time trajectory estimation and mapping based on Gaussian Processes (GP). State-of-the-art GP-based models for Simultaneous Localization and Mapping (SLAM) are computationally efficient but can only be used with a restricted class of kernel functions. This paper provides the algorithm based on GP with Random Fourier Features(RFF)approximation for SLAM without any constraints. The advantages of RFF for continuous-time SLAM are that we can consider a broader class of kernels and, at the same time, significantly reduce computational complexity by operating in the Fourier space of features. The additional speedup can be obtained by limiting the number of features. Our experimental results on synthetic and real-world benchmarks demonstrate the cases in which our approach provides better results compared to the current state-of-the-art.