 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStochastic Policy Gradient Methods: Improved Sample Complexity for Fisher-non-degenerate Policies
Feb 03, 2023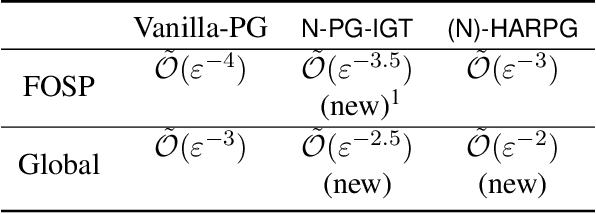
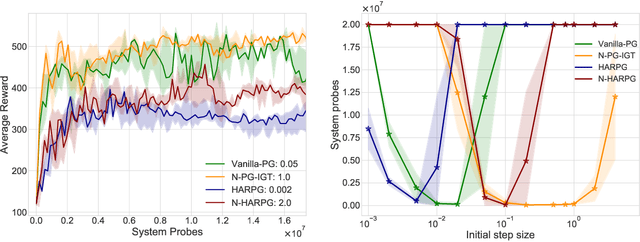
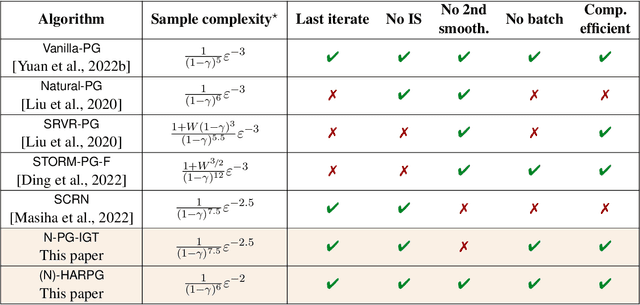
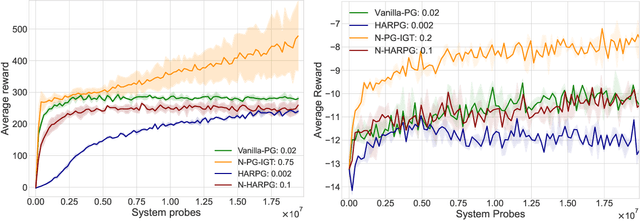
Recently, the impressive empirical success of policy gradient (PG) methods has catalyzed the development of their theoretical foundations. Despite the huge efforts directed at the design of efficient stochastic PG-type algorithms, the understanding of their convergence to a globally optimal policy is still limited. In this work, we develop improved global convergence guarantees for a general class of Fisher-non-degenerate parameterized policies which allows to address the case of continuous state action spaces. First, we propose a Normalized Policy Gradient method with Implicit Gradient Transport (N-PG-IGT) and derive a $\tilde{\mathcal{O}}(\varepsilon^{-2.5})$ sample complexity of this method for finding a global $\varepsilon$-optimal policy. Improving over the previously known $\tilde{\mathcal{O}}(\varepsilon^{-3})$ complexity, this algorithm does not require the use of importance sampling or second-order information and samples only one trajectory per iteration. Second, we further improve this complexity to $\tilde{ \mathcal{\mathcal{O}} }(\varepsilon^{-2})$ by considering a Hessian-Aided Recursive Policy Gradient ((N)-HARPG) algorithm enhanced with a correction based on a Hessian-vector product. Interestingly, both algorithms are $(i)$ simple and easy to implement: single-loop, do not require large batches of trajectories and sample at most two trajectories per iteration; $(ii)$ computationally and memory efficient: they do not require expensive subroutines at each iteration and can be implemented with memory linear in the dimension of parameters.