 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSonar-based Deep Learning in Underwater Robotics: Overview, Robustness and Challenges
Dec 16, 2024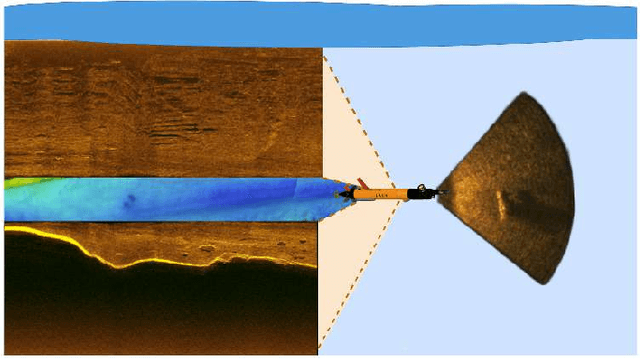
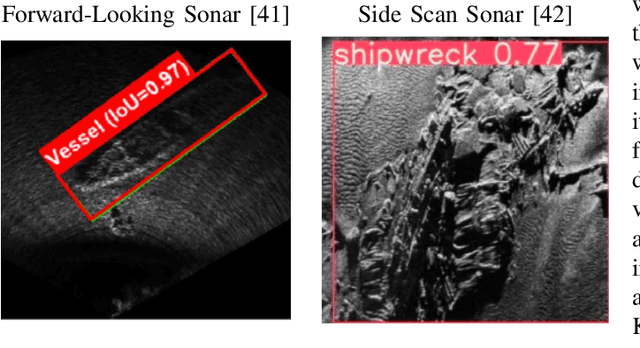
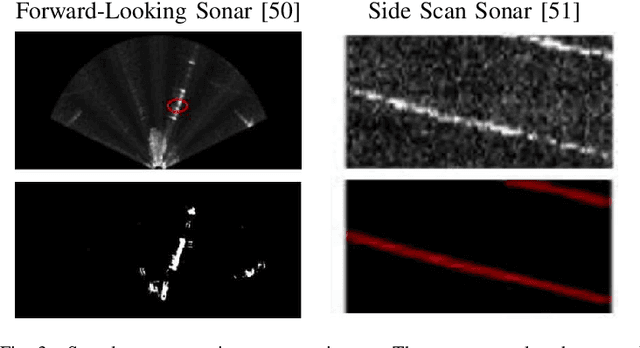
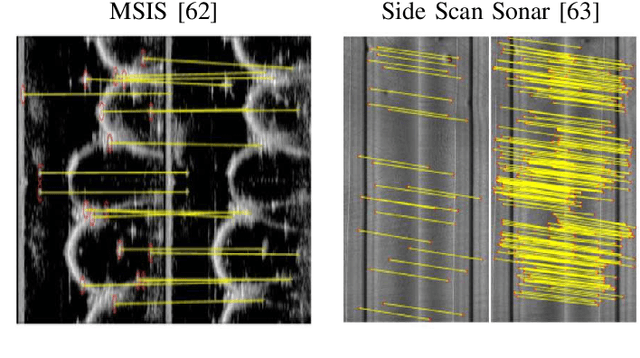
With the growing interest in underwater exploration and monitoring, Autonomous Underwater Vehicles (AUVs) have become essential. The recent interest in onboard Deep Learning (DL) has advanced real-time environmental interaction capabilities relying on efficient and accurate vision-based DL models. However, the predominant use of sonar in underwater environments, characterized by limited training data and inherent noise, poses challenges to model robustness. This autonomy improvement raises safety concerns for deploying such models during underwater operations, potentially leading to hazardous situations. This paper aims to provide the first comprehensive overview of sonar-based DL under the scope of robustness. It studies sonar-based DL perception task models, such as classification, object detection, segmentation, and SLAM. Furthermore, the paper systematizes sonar-based state-of-the-art datasets, simulators, and robustness methods such as neural network verification, out-of-distribution, and adversarial attacks. This paper highlights the lack of robustness in sonar-based DL research and suggests future research pathways, notably establishing a baseline sonar-based dataset and bridging the simulation-to-reality gap.
ROSAR: An Adversarial Re-Training Framework for Robust Side-Scan Sonar Object Detection
Oct 14, 2024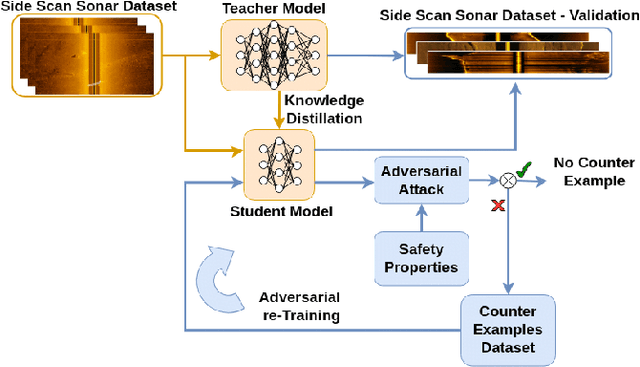
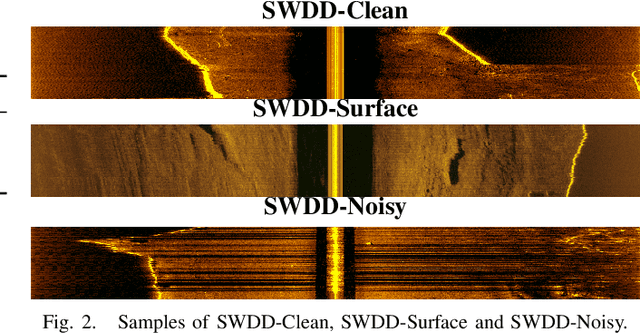
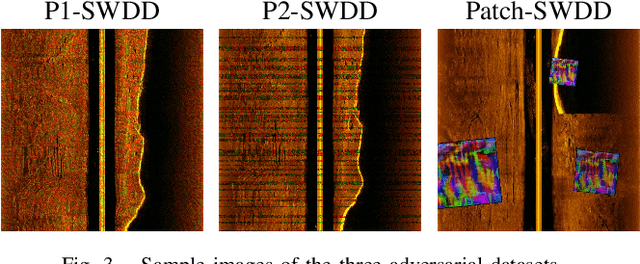
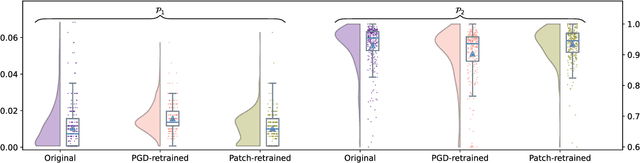
This paper introduces ROSAR, a novel framework enhancing the robustness of deep learning object detection models tailored for side-scan sonar (SSS) images, generated by autonomous underwater vehicles using sonar sensors. By extending our prior work on knowledge distillation (KD), this framework integrates KD with adversarial retraining to address the dual challenges of model efficiency and robustness against SSS noises. We introduce three novel, publicly available SSS datasets, capturing different sonar setups and noise conditions. We propose and formalize two SSS safety properties and utilize them to generate adversarial datasets for retraining. Through a comparative analysis of projected gradient descent (PGD) and patch-based adversarial attacks, ROSAR demonstrates significant improvements in model robustness and detection accuracy under SSS-specific conditions, enhancing the model's robustness by up to 1.85%. ROSAR is available at https://github.com/remaro-network/ROSAR-framework.
Knowledge Distillation in YOLOX-ViT for Side-Scan Sonar Object Detection
Mar 14, 2024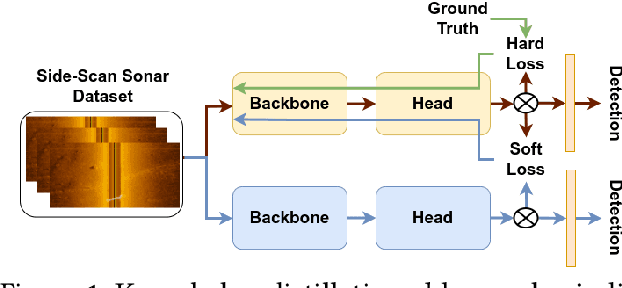
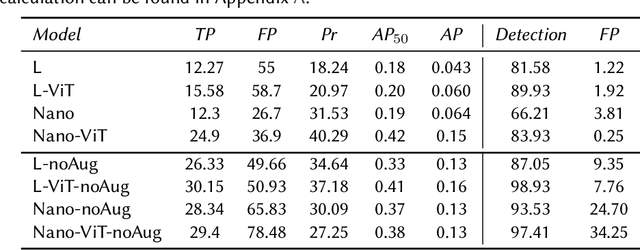
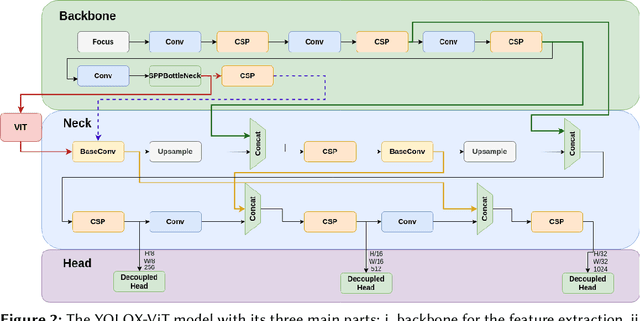
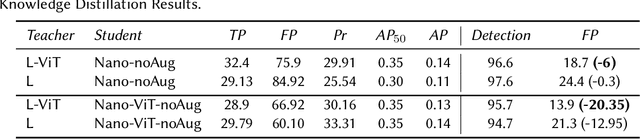
In this paper we present YOLOX-ViT, a novel object detection model, and investigate the efficacy of knowledge distillation for model size reduction without sacrificing performance. Focused on underwater robotics, our research addresses key questions about the viability of smaller models and the impact of the visual transformer layer in YOLOX. Furthermore, we introduce a new side-scan sonar image dataset, and use it to evaluate our object detector's performance. Results show that knowledge distillation effectively reduces false positives in wall detection. Additionally, the introduced visual transformer layer significantly improves object detection accuracy in the underwater environment. The source code of the knowledge distillation in the YOLOX-ViT is at https://github.com/remaro-network/KD-YOLOX-ViT.