 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrojan Attacks on Neural Network Controllers for Robotic Systems
Feb 04, 2026Neural network controllers are increasingly deployed in robotic systems for tasks such as trajectory tracking and pose stabilization. However, their reliance on potentially untrusted training pipelines or supply chains introduces significant security vulnerabilities. This paper investigates backdoor (Trojan) attacks against neural controllers, using a differential-drive mobile robot platform as a case study. In particular, assuming that the robot's tracking controller is implemented as a neural network, we design a lightweight, parallel Trojan network that can be embedded within the controller. This malicious module remains dormant during normal operation but, upon detecting a highly specific trigger condition defined by the robot's pose and goal parameters, compromises the primary controller's wheel velocity commands, resulting in undesired and potentially unsafe robot behaviours. We provide a proof-of-concept implementation of the proposed Trojan network, which is validated through simulation under two different attack scenarios. The results confirm the effectiveness of the proposed attack and demonstrate that neural network-based robotic control systems are subject to potentially critical security threats.
Large Language Models for Detecting Cyberattacks on Smart Grid Protective Relays
Jan 07, 2026This paper presents a large language model (LLM)-based framework for detecting cyberattacks on transformer current differential relays (TCDRs), which, if undetected, may trigger false tripping of critical transformers. The proposed approach adapts and fine-tunes compact LLMs such as DistilBERT to distinguish cyberattacks from actual faults using textualized multidimensional TCDR current measurements recorded before and after tripping. Our results demonstrate that DistilBERT detects 97.6% of cyberattacks without compromising TCDR dependability and achieves inference latency below 6 ms on a commercial workstation. Additional evaluations confirm the framework's robustness under combined time-synchronization and false-data-injection attacks, resilience to measurement noise, and stability across prompt formulation variants. Furthermore, GPT-2 and DistilBERT+LoRA achieve comparable performance, highlighting the potential of LLMs for enhancing smart grid cybersecurity. We provide the full dataset used in this study for reproducibility.
A Kolmogorov-Arnold Network for Interpretable Cyberattack Detection in AGC Systems
Sep 05, 2025Automatic Generation Control (AGC) is essential for power grid stability but remains vulnerable to stealthy cyberattacks, such as False Data Injection Attacks (FDIAs), which can disturb the system's stability while evading traditional detection methods. Unlike previous works that relied on blackbox approaches, this work proposes Kolmogorov-Arnold Networks (KAN) as an interpretable and accurate method for FDIA detection in AGC systems, considering the system nonlinearities. KAN models include a method for extracting symbolic equations, and are thus able to provide more interpretability than the majority of machine learning models. The proposed KAN is trained offline to learn the complex nonlinear relationships between the AGC measurements under different operating scenarios. After training, symbolic formulas that describe the trained model's behavior can be extracted and leveraged, greatly enhancing interpretability. Our findings confirm that the proposed KAN model achieves FDIA detection rates of up to 95.97% and 95.9% for the initial model and the symbolic formula, respectively, with a low false alarm rate, offering a reliable approach to enhancing AGC cybersecurity.
A Kolmogorov-Arnold Network for Explainable Detection of Cyberattacks on EV Chargers
Mar 04, 2025The increasing adoption of Electric Vehicles (EVs) and the expansion of charging infrastructure and their reliance on communication expose Electric Vehicle Supply Equipment (EVSE) to cyberattacks. This paper presents a novel Kolmogorov-Arnold Network (KAN)-based framework for detecting cyberattacks on EV chargers using only power consumption measurements. Leveraging the KAN's capability to model nonlinear, high-dimensional functions and its inherently interpretable architecture, the framework effectively differentiates between normal and malicious charging scenarios. The model is trained offline on a comprehensive dataset containing over 100,000 cyberattack cases generated through an experimental setup. Once trained, the KAN model can be deployed within individual chargers for real-time detection of abnormal charging behaviors indicative of cyberattacks. Our results demonstrate that the proposed KAN-based approach can accurately detect cyberattacks on EV chargers with Precision and F1-score of 99% and 92%, respectively, outperforming existing detection methods. Additionally, the proposed KANs's enable the extraction of mathematical formulas representing KAN's detection decisions, addressing interpretability, a key challenge in deep learning-based cybersecurity frameworks. This work marks a significant step toward building secure and explainable EV charging infrastructure.
Unmasking Covert Intrusions: Detection of Fault-Masking Cyberattacks on Differential Protection Systems
Sep 06, 2024



Line Current Differential Relays (LCDRs) are high-speed relays progressively used to protect critical transmission lines. However, LCDRs are vulnerable to cyberattacks. Fault-Masking Attacks (FMAs) are stealthy cyberattacks performed by manipulating the remote measurements of the targeted LCDR to disguise faults on the protected line. Hence, they remain undetected by this LCDR. In this paper, we propose a two-module framework to detect FMAs. The first module is a Mismatch Index (MI) developed from the protected transmission line's equivalent physical model. The MI is triggered only if there is a significant mismatch in the LCDR's local and remote measurements while the LCDR itself is untriggered, which indicates an FMA. After the MI is triggered, the second module, a neural network-based classifier, promptly confirms that the triggering event is a physical fault that lies on the line protected by the LCDR before declaring the occurrence of an FMA. The proposed framework is tested using the IEEE 39-bus benchmark system. Our simulation results confirm that the proposed framework can accurately detect FMAs on LCDRs and is not affected by normal system disturbances, variations, or measurement noise. Our experimental results using OPAL-RT's real-time simulator confirm the proposed solution's real-time performance capability.
Enhancing Power Quality Event Classification with AI Transformer Models
Feb 22, 2024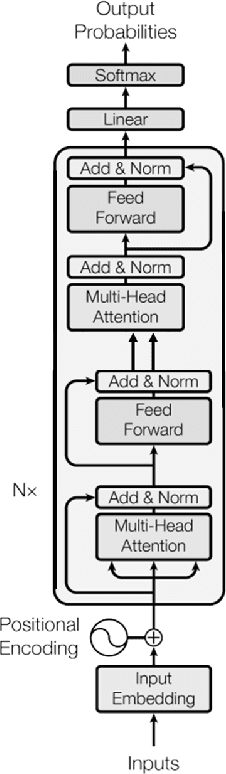
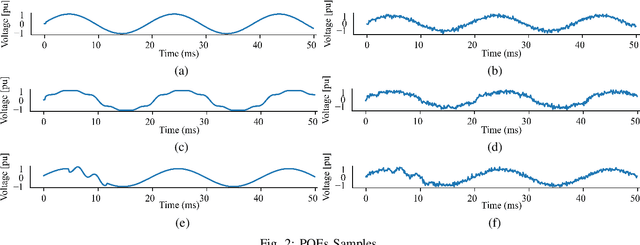
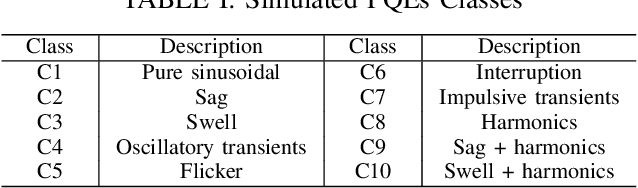
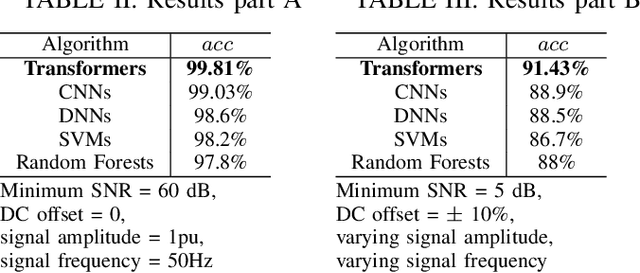
Recently, there has been a growing interest in utilizing machine learning for accurate classification of power quality events (PQEs). However, most of these studies are performed assuming an ideal situation, while in reality, we can have measurement noise, DC offset, and variations in the voltage signal's amplitude and frequency. Building on the prior PQE classification works using deep learning, this paper proposes a deep-learning framework that leverages attention-enabled Transformers as a tool to accurately classify PQEs under the aforementioned considerations. The proposed framework can operate directly on the voltage signals with no need for a separate feature extraction or calculation phase. Our results show that the proposed framework outperforms recently proposed learning-based techniques. It can accurately classify PQEs under the aforementioned conditions with an accuracy varying between 99.81%$-$91.43% depending on the signal-to-noise ratio, DC offsets, and variations in the signal amplitude and frequency.
An Observer-Based Key Agreement Scheme for Remotely Controlled Mobile Robots
Mar 08, 2023Remotely controlled mobile robots are important examples of Cyber-Physical Systems (CPSs). Recently, these robots are being deployed in many safety critical applications. Therefore, ensuring their cyber-security is of paramount importance. Different control schemes that have been proposed to secure such systems against sophisticated cyber-attacks require the exchange of secret messages between their smart actuators and the remote controller. Thus, these schemes require pre-shared secret keys, or an established Public Key Infrastructure (PKI) that allows for key agreement. Such cryptographic approaches might not always be suitable for the deployment environments of such remotely mobile robots. To address this problem, in this paper, we consider a control theoretic approach for establishing a secret key between the remotely controlled robot and the networked controller without resorting to traditional cryptographic techniques. Our key agreement scheme leverages a nonlinear unknown input observer and an error correction code mechanism to allow the robot to securely agree on a secret key with its remote controller. To validate the proposed scheme, we implement it using a Khepera-IV differential drive robot and evaluate its efficiency and the additional control cost acquired by it. Our experimental results confirm the effectiveness of the proposed key establishment scheme.