 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial Robustness Analysis of Cloud-Assisted Autonomous Driving Systems
Apr 06, 2026Autonomous vehicles increasingly rely on deep learning-based perception and control, which impose substantial computational demands. Cloud-assisted architectures offload these functions to remote servers, enabling enhanced perception and coordinated decision-making through the Internet of Vehicles (IoV). However, this paradigm introduces cross-layer vulnerabilities, where adversarial manipulation of perception models and network impairments in the vehicle-cloud link can jointly undermine safety-critical autonomy. This paper presents a hardware-in-the-loop IoV testbed that integrates real-time perception, control, and communication to evaluate such vulnerabilities in cloud-assisted autonomous driving. A YOLOv8-based object detector deployed on the cloud is subjected to whitebox adversarial attacks using the Fast Gradient Sign Method (FGSM) and Projected Gradient Descent (PGD), while network adversaries induce delay and packet loss in the vehicle-cloud loop. Results show that adversarial perturbations significantly degrade perception performance, with PGD reducing detection precision and recall from 0.73 and 0.68 in the clean baseline to 0.22 and 0.15 at epsilon= 0.04. Network delays of 150-250 ms, corresponding to transient losses of approximately 3-4 frames, and packet loss rates of 0.5-5 % further destabilize closed-loop control, leading to delayed actuation and rule violations. These findings highlight the need for cross-layer resilience in cloud-assisted autonomous driving systems.
Dynamic Lookahead Distance via Reinforcement Learning-Based Pure Pursuit for Autonomous Racing
Mar 30, 2026Pure Pursuit (PP) is a widely used path-tracking algorithm in autonomous vehicles due to its simplicity and real-time performance. However, its effectiveness is sensitive to the choice of lookahead distance: shorter values improve cornering but can cause instability on straights, while longer values improve smoothness but reduce accuracy in curves. We propose a hybrid control framework that integrates Proximal Policy Optimization (PPO) with the classical Pure Pursuit controller to adjust the lookahead distance dynamically during racing. The PPO agent maps vehicle speed and multi-horizon curvature features to an online lookahead command. It is trained using Stable-Baselines3 in the F1TENTH Gym simulator with a KL penalty and learning-rate decay for stability, then deployed in a ROS2 environment to guide the controller. Experiments in simulation compare the proposed method against both fixed-lookahead Pure Pursuit and an adaptive Pure Pursuit baseline. Additional real-car experiments compare the learned controller against a fixed-lookahead Pure Pursuit controller. Results show that the learned policy improves lap-time performance and repeated lap completion on unseen tracks, while also transferring zero-shot to hardware. The learned controller adapts the lookahead by increasing it on straights and reducing it in curves, demonstrating effectiveness in augmenting a classical controller by online adaptation of a single interpretable parameter. On unseen tracks, the proposed method achieved 33.16 s on Montreal and 46.05 s on Yas Marina, while tolerating more aggressive speed-profile scaling than the baselines and achieving the best lap times among the tested settings. Initial real-car experiments further support sim-to-real transfer on a 1:10-scale autonomous racing platform
Robust Global-Local Behavior Arbitration via Continuous Command Fusion Under LiDAR Errors
Mar 28, 2026Modular autonomous driving systems must coordinate global progress objectives with local safety-driven reactions under imperfect sensing and strict real-time constraints. This paper presents a ROS2-native arbitration module that continuously fuses the outputs of two unchanged and interpretable controllers: a global reference-tracking controller based on Pure Pursuit and a reactive LiDAR-based Gap Follow controller. At each control step, both controllers propose Ackermann commands, and a PPO-trained policy predicts a continuous gate from a compact feature observation to produce a single fused drive command, augmented with practical safety checks. For comparison under identical ROS topic inputs and control rate, we implement a lightweight sampling-based predictive baseline. Robustness is evaluated using a ROS2 impairment protocol that injects LiDAR noise, delay, and dropout, and additionally sweeps forward-cone false short-range outliers. In a repeatable close-proximity passing scenario, we report safe success and failure rates together with per-step end-to-end controller runtime as sensing stress increases. The study is intended as a command-level robustness evaluation in a modular ROS2 setting, not as a replacement for planning-level interaction reasoning.
Camera Perspective Transformation to Bird's Eye View via Spatial Transformer Model for Road Intersection Monitoring
Aug 14, 2024



Road intersection monitoring and control research often utilize bird's eye view (BEV) simulators. In real traffic settings, achieving a BEV akin to that in a simulator necessitates the deployment of drones or specific sensor mounting, which is neither feasible nor practical. Consequently, traffic intersection management remains confined to simulation environments given these constraints. In this paper, we address the gap between simulated environments and real-world implementation by introducing a novel deep-learning model that converts a single camera's perspective of a road intersection into a BEV. We created a simulation environment that closely resembles a real-world traffic junction. The proposed model transforms the vehicles into BEV images, facilitating road intersection monitoring and control model processing. Inspired by image transformation techniques, we propose a Spatial-Transformer Double Decoder-UNet (SDD-UNet) model that aims to eliminate the transformed image distortions. In addition, the model accurately estimates the vehicle's positions and enables the direct application of simulation-trained models in real-world contexts. SDD-UNet model achieves an average dice similarity coefficient (DSC) above 95% which is 40% better than the original UNet model. The mean absolute error (MAE) is 0.102 and the centroid of the predicted mask is 0.14 meters displaced, on average, indicating high accuracy.
Cloud-based Federated Learning Framework for MRI Segmentation
Mar 01, 2024
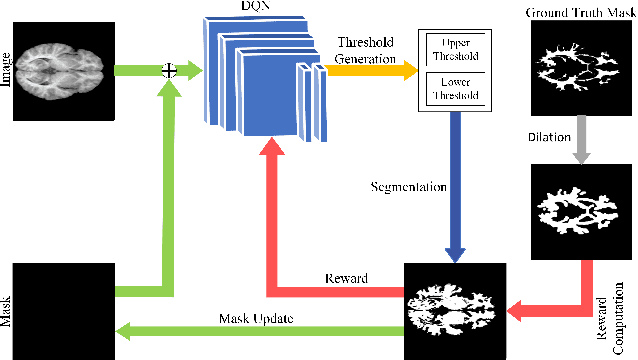


In contemporary rural healthcare settings, the principal challenge in diagnosing brain images is the scarcity of available data, given that most of the existing deep learning models demand extensive training data to optimize their performance, necessitating centralized processing methods that potentially compromise data privacy. This paper proposes a novel framework tailored for brain tissue segmentation in rural healthcare facilities. The framework employs a deep reinforcement learning (DRL) environment in tandem with a refinement model (RM) deployed locally at rural healthcare sites. The proposed DRL model has a reduced parameter count and practicality for implementation across distributed rural sites. To uphold data privacy and enhance model generalization without transgressing privacy constraints, we employ federated learning (FL) for cooperative model training. We demonstrate the efficacy of our approach by training the network with a limited data set and observing a substantial performance enhancement, mitigating inaccuracies and irregularities in segmentation across diverse sites. Remarkably, the DRL model attains an accuracy of up to 80%, surpassing the capabilities of conventional convolutional neural networks when confronted with data insufficiency. Incorporating our RM results in an additional accuracy improvement of at least 10%, while FL contributes to a further accuracy enhancement of up to 5%. Collectively, the framework achieves an average 92% accuracy rate within rural healthcare settings characterized by data constraints.
iDriveSense: Dynamic Route Planning Involving Roads Quality Information
Sep 08, 2018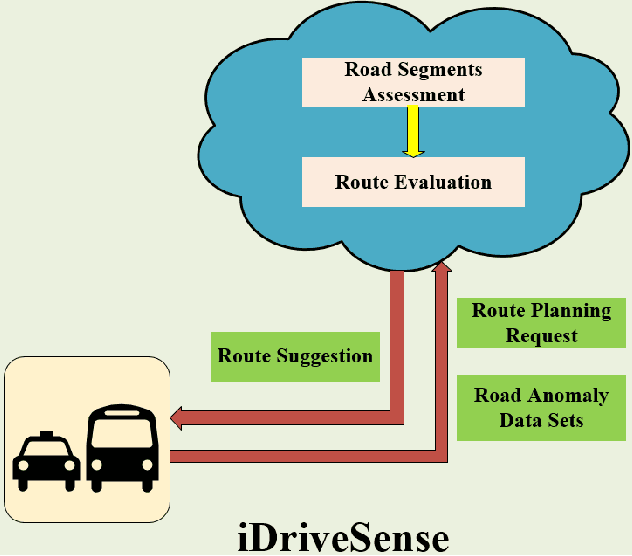
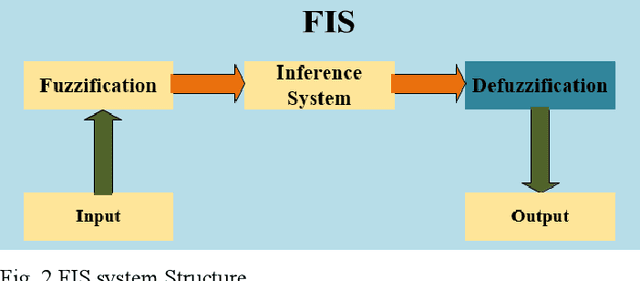
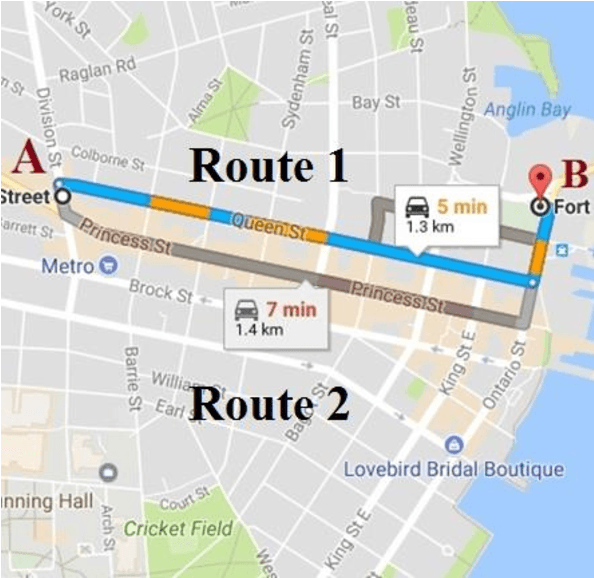

Owing to the expeditious growth in the information and communication technologies, smart cities have raised the expectations in terms of efficient functioning and management. One key aspect of residents' daily comfort is assured through affording reliable traffic management and route planning. Comprehensively, the majority of the present trip planning applications and service providers are enabling their trip planning recommendations relying on shortest paths and/or fastest routes. However, such suggestions may discount drivers' preferences with respect to safe and less disturbing trips. Road anomalies such as cracks, potholes, and manholes induce risky driving scenarios and can lead to vehicles damages and costly repairs. Accordingly, in this paper, we propose a crowdsensing based dynamic route planning system. Leveraging both the vehicle motion sensors and the inertial sensors within the smart devices, road surface types and anomalies have been detected and categorized. In addition, the monitored events are geo-referenced utilizing GPS receivers on both vehicles and smart devices. Consequently, road segments assessments are conducted using fuzzy system models based on aspects such as the number of anomalies and their severity levels in each road segment. Afterward, another fuzzy model is adopted to recommend the best trip routes based on the road segments quality in each potential route. Extensive road experiments are held to build and show the potential of the proposed system.