 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCooperative control of multi-agent systems to locate source of an odor
Nov 10, 2017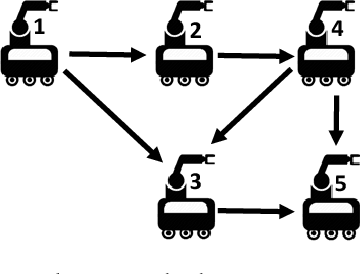
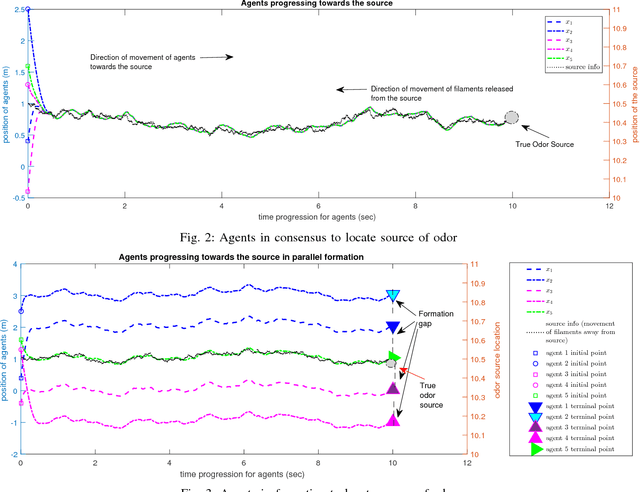
This work targets the problem of odor source localization by multi-agent systems. A hierarchical cooperative control has been put forward to solve the problem of locating source of an odor by driving the agents in consensus when at least one agent obtains information about location of the source. Synthesis of the proposed controller has been carried out in a hierarchical manner of group decision making, path planning and control. Decision making utilizes information of the agents using conventional Particle Swarm Algorithm and information of the movement of filaments to predict the location of the odor source. The predicted source location in the decision level is then utilized to map a trajectory and pass that information to the control level. The distributed control layer uses sliding mode controllers known for their inherent robustness and the ability to reject matched disturbances completely. Two cases of movement of agents towards the source, i.e., under consensus and formation have been discussed herein. Finally, numerical simulations demonstrate the efficacy of the proposed hierarchical distributed control.