 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeY-MAP-Net: Real-time depth, normals, segmentation, multi-label captioning and 2D human pose in RGB images
Nov 15, 2024



We present Y-MAP-Net, a Y-shaped neural network architecture designed for real-time multi-task learning on RGB images. Y-MAP-Net, simultaneously predicts depth, surface normals, human pose, semantic segmentation and generates multi-label captions, all from a single network evaluation. To achieve this, we adopt a multi-teacher, single-student training paradigm, where task-specific foundation models supervise the network's learning, enabling it to distill their capabilities into a lightweight architecture suitable for real-time applications. Y-MAP-Net, exhibits strong generalization, simplicity and computational efficiency, making it ideal for robotics and other practical scenarios. To support future research, we will release our code publicly.
On the Feasibility of Real-Time 3D Hand Tracking using Edge GPGPU Acceleration
Apr 30, 2018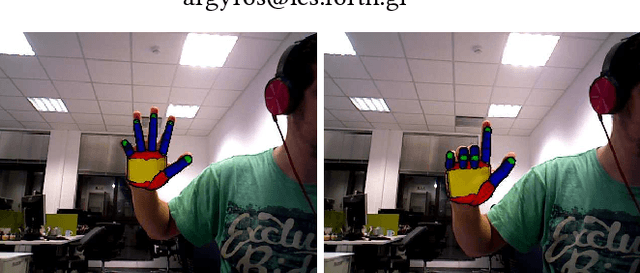
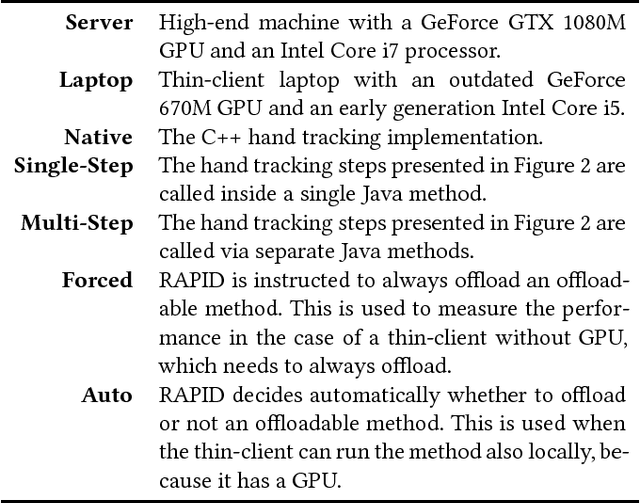
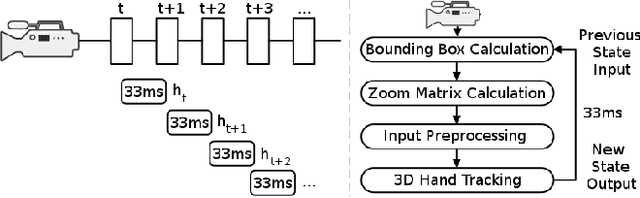
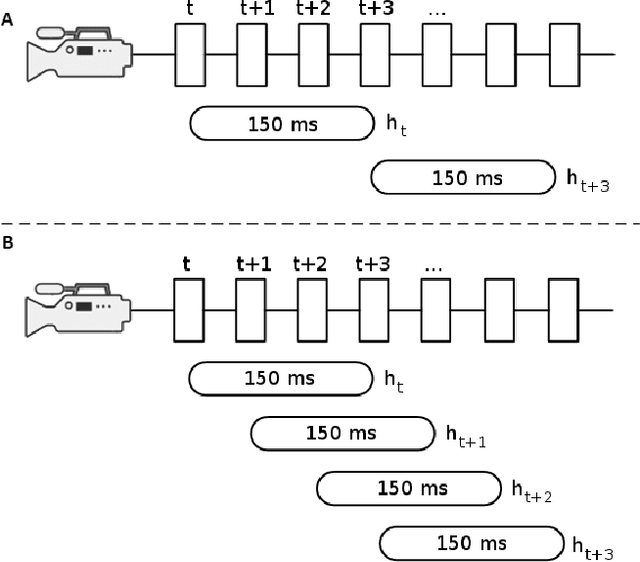
This paper presents the case study of a non-intrusive porting of a monolithic C++ library for real-time 3D hand tracking, to the domain of edge-based computation. Towards a proof of concept, the case study considers a pair of workstations, a computationally powerful and a computationally weak one. By wrapping the C++ library in Java container and by capitalizing on a Java-based offloading infrastructure that supports both CPU and GPGPU computations, we are able to establish automatically the required server-client workflow that best addresses the resource allocation problem in the effort to execute from the weak workstation. As a result, the weak workstation can perform well at the task, despite lacking the sufficient hardware to do the required computations locally. This is achieved by offloading computations which rely on GPGPU, to the powerful workstation, across the network that connects them. We show the edge-based computation challenges associated with the information flow of the ported algorithm, demonstrate how we cope with them, and identify what needs to be improved for achieving even better performance.