 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCARLOS: An Open, Modular, and Scalable Simulation Framework for the Development and Testing of Software for C-ITS
Apr 04, 2024Future mobility systems and their components are increasingly defined by their software. The complexity of these cooperative intelligent transport systems (C-ITS) and the everchanging requirements posed at the software require continual software updates. The dynamic nature of the system and the practically innumerable scenarios in which different software components work together necessitate efficient and automated development and testing procedures that use simulations as one core methodology. The availability of such simulation architectures is a common interest among many stakeholders, especially in the field of automated driving. That is why we propose CARLOS - an open, modular, and scalable simulation framework for the development and testing of software in C-ITS that leverages the rich CARLA and ROS ecosystems. We provide core building blocks for this framework and explain how it can be used and extended by the community. Its architecture builds upon modern microservice and DevOps principles such as containerization and continuous integration. In our paper, we motivate the architecture by describing important design principles and showcasing three major use cases - software prototyping, data-driven development, and automated testing. We make CARLOS and example implementations of the three use cases publicly available at github.com/ika-rwth-aachen/carlos
Corridor for new mobility Aachen-Düsseldorf: Methods and concepts of the research project ACCorD
Jul 13, 2021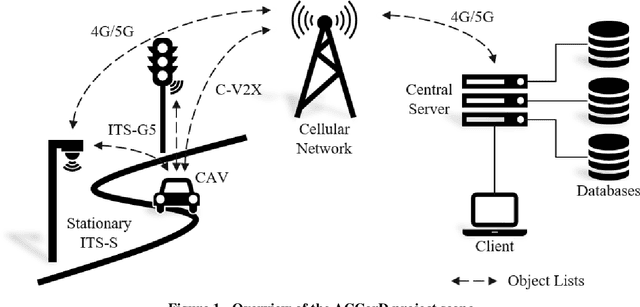
With the Corridor for New Mobility Aachen - D\"usseldorf, an integrated development environment is created, incorporating existing test capabilities, to systematically test and validate automated vehicles in interaction with connected Intelligent Transport Systems Stations (ITS-Ss). This is achieved through a time- and cost-efficient toolchain and methodology, in which simulation, closed test sites as well as test fields in public transport are linked in the best possible way. By implementing a digital twin, the recorded traffic events can be visualized in real-time and driving functions can be tested in the simulation based on real data. In order to represent diverse traffic scenarios, the corridor contains a highway section, a rural area, and urban areas. First, this paper outlines the project goals before describing the individual project contents in more detail. These include the concepts of traffic detection, driving function development, digital twin development, and public involvement.
High-Precision Digital Traffic Recording with Multi-LiDAR Infrastructure Sensor Setups
Jun 22, 2020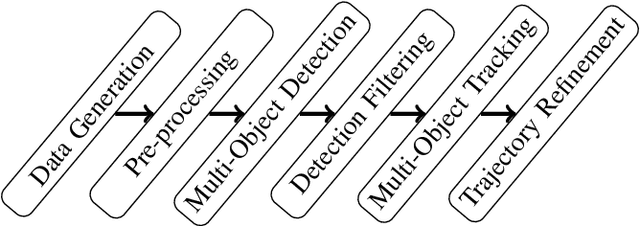
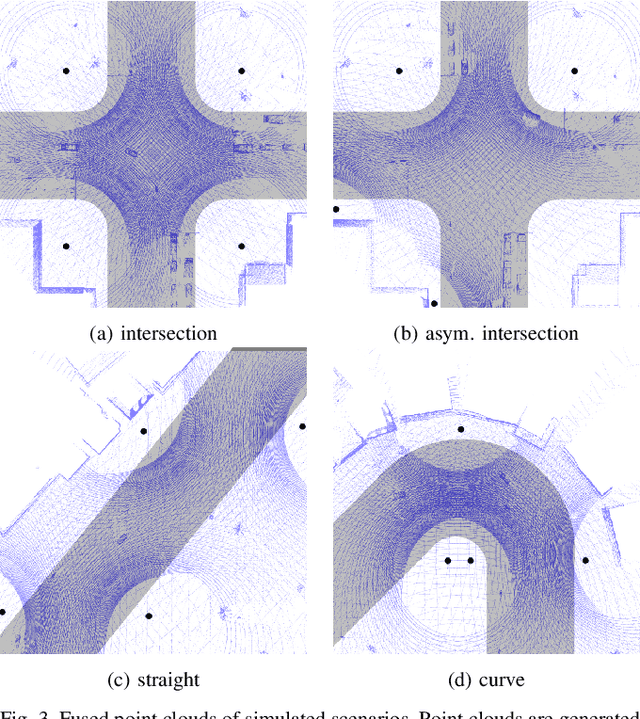
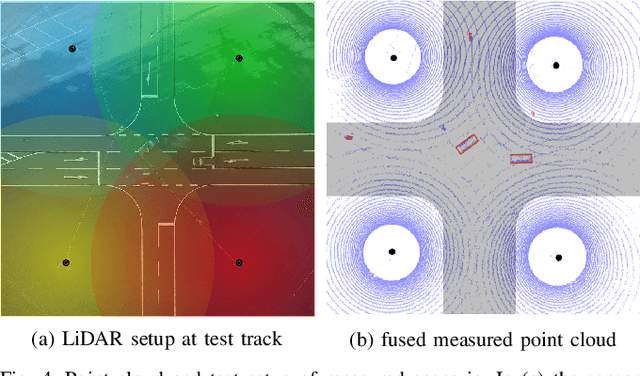
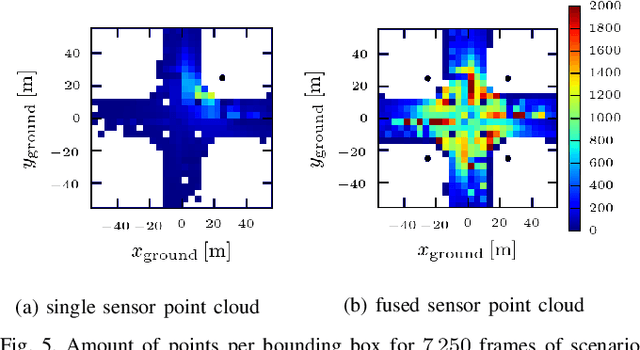
Large driving datasets are a key component in the current development and safeguarding of automated driving functions. Various methods can be used to collect such driving data records. In addition to the use of sensor equipped research vehicles or unmanned aerial vehicles (UAVs), the use of infrastructure sensor technology offers another alternative. To minimize object occlusion during data collection, it is crucial to record the traffic situation from several perspectives in parallel. A fusion of all raw sensor data might create better conditions for multi-object detection and tracking (MODT) compared to the use of individual raw sensor data. So far, no sufficient studies have been conducted to sufficiently confirm this approach. In our work we investigate the impact of fused LiDAR point clouds compared to single LiDAR point clouds. We model different urban traffic scenarios with up to eight 64-layer LiDARs in simulation and in reality. We then analyze the properties of the resulting point clouds and perform MODT for all emerging traffic participants. The evaluation of the extracted trajectories shows that a fused infrastructure approach significantly increases the tracking results and reaches accuracies within a few centimeters.