 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Systematic Literature Review on Deep Learning-based Depth Estimation in Computer Vision
Jan 09, 2025



Depth estimation (DE) provides spatial information about a scene and enables tasks such as 3D reconstruction, object detection, and scene understanding. Recently, there has been an increasing interest in using deep learning (DL)-based methods for DE. Traditional techniques rely on handcrafted features that often struggle to generalise to diverse scenes and require extensive manual tuning. However, DL models for DE can automatically extract relevant features from input data, adapt to various scene conditions, and generalise well to unseen environments. Numerous DL-based methods have been developed, making it necessary to survey and synthesize the state-of-the-art (SOTA). Previous reviews on DE have mainly focused on either monocular or stereo-based techniques, rather than comprehensively reviewing DE. Furthermore, to the best of our knowledge, there is no systematic literature review (SLR) that comprehensively focuses on DE. Therefore, this SLR study is being conducted. Initially, electronic databases were searched for relevant publications, resulting in 1284 publications. Using defined exclusion and quality criteria, 128 publications were shortlisted and further filtered to select 59 high-quality primary studies. These studies were analysed to extract data and answer defined research questions. Based on the results, DL methods were developed for mainly three different types of DE: monocular, stereo, and multi-view. 20 publicly available datasets were used to train, test, and evaluate DL models for DE, with KITTI, NYU Depth V2, and Make 3D being the most used datasets. 29 evaluation metrics were used to assess the performance of DE. 35 base models were reported in the primary studies, and the top five most-used base models were ResNet-50, ResNet-18, ResNet-101, U-Net, and VGG-16. Finally, the lack of ground truth data was among the most significant challenges reported by primary studies.
Exploring the Feasibility of Affordable Sonar Technology: Object Detection in Underwater Environments Using the Ping 360
Nov 07, 2024This study explores the potential of the Ping 360 sonar device, primarily used for navigation, in detecting complex underwater obstacles. The key motivation behind this research is the device's affordability and open-source nature, offering a cost-effective alternative to more expensive imaging sonar systems. The investigation focuses on understanding the behaviour of the Ping 360 in controlled environments and assessing its suitability for object detection, particularly in scenarios where human operators are unavailable for inspecting offshore structures in shallow waters. Through a series of carefully designed experiments, we examined the effects of surface reflections and object shadows in shallow underwater environments. Additionally, we developed a manually annotated sonar image dataset to train a U-Net segmentation model. Our findings indicate that while the Ping 360 sonar demonstrates potential in simpler settings, its performance is limited in more cluttered or reflective environments unless extensive data pre-processing and annotation are applied. To our knowledge, this is the first study to evaluate the Ping 360's capabilities for complex object detection. By investigating the feasibility of low-cost sonar devices, this research provides valuable insights into their limitations and potential for future AI-based interpretation, marking a unique contribution to the field.
Application of deep learning for livestock behaviour recognition: A systematic literature review
Oct 20, 2023



Livestock health and welfare monitoring has traditionally been a labor-intensive task performed manually. Recent advances have led to the adoption of AI and computer vision techniques, particularly deep learning models, as decision-making tools within the livestock industry. These models have been employed for tasks like animal identification, tracking, body part recognition, and species classification. In the past decade, there has been a growing interest in using these models to explore the connection between livestock behaviour and health issues. While previous review studies have been rather generic, there is currently no review study specifically focusing on DL for livestock behaviour recognition. Hence, this systematic literature review (SLR) was conducted. The SLR involved an initial search across electronic databases, resulting in 1101 publications. After applying defined selection criteria, 126 publications were shortlisted. These publications were further filtered based on quality criteria, resulting in the selection of 44 high-quality primary studies. These studies were analysed to address the research questions. The results showed that DL successfully addressed 13 behaviour recognition problems encompassing 44 different behaviour classes. A variety of DL models and networks were employed, with CNN, Faster R-CNN, YOLOv5, and YOLOv4 being among the most common models, and VGG16, CSPDarknet53, GoogLeNet, ResNet101, and ResNet50 being popular networks. Performance evaluation involved ten different matrices, with precision and accuracy being the most frequently used. Primary studies identified challenges, including occlusion, adhesion, data imbalance, and the complexities of the livestock environment. The SLR study also discussed potential solutions and research directions to facilitate the development of autonomous livestock behaviour recognition systems.
Deep Scattering Spectrum germaneness to Fault Detection and Diagnosis for Component-level Prognostics and Health Management (PHM)
Oct 20, 2022
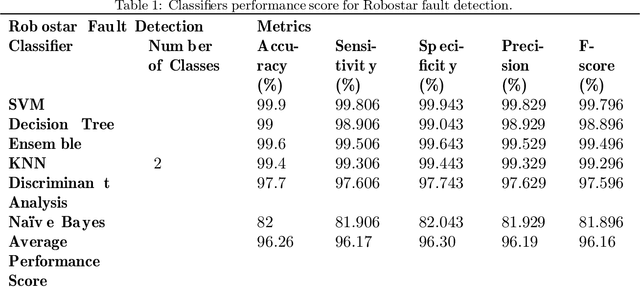
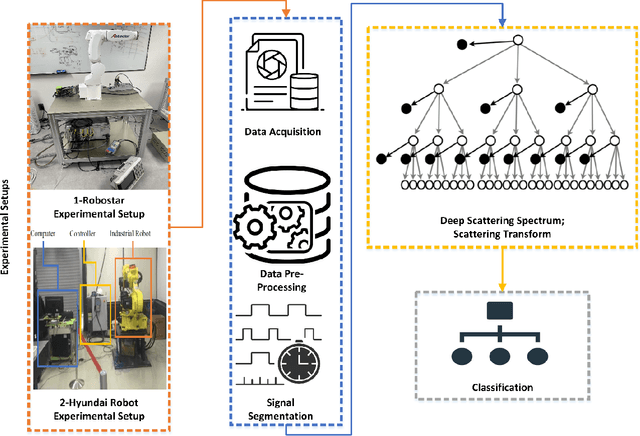
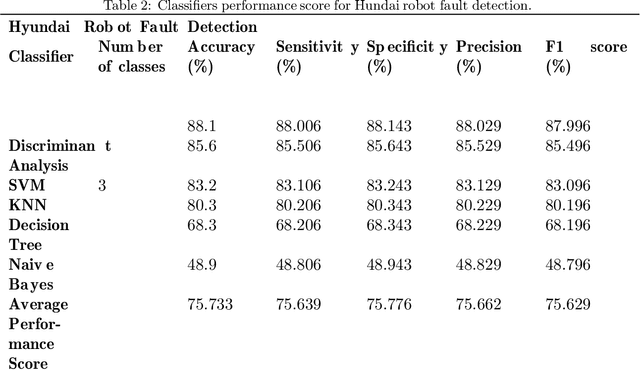
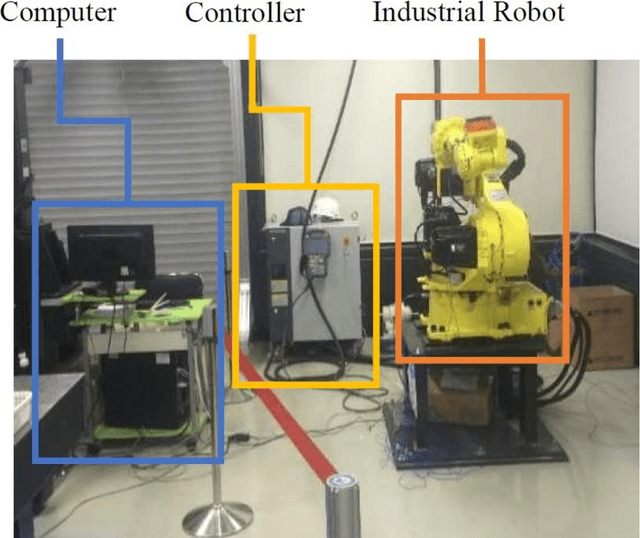
In fault detection and diagnosis of prognostics and health management (PHM) systems, most of the methodologies utilize machine learning (ML) or deep learning (DL) through which either some features are extracted beforehand (in the case of ML) or filters are used to extract features autonomously (in case of DL) to perform the critical classification task. Particularly in the fault detection and diagnosis of industrial robots where electric current, vibration or acoustic emissions signals are the primary sources of information, a feature domain that can map the signals into their constituent components with compressed information at different levels can reduce the complexities and size of typical ML and DL-based frameworks. The Deep Scattering Spectrum (DSS) is one of the strategies that use the Wavelet Transform (WT) analogy to separate and extract the information encoded in a signal's various temporal and frequency domains. As a result, the focus of this work is on the study of the DSS's relevance to fault detection and daignosis for mechanical components of industrail robots. We used multiple industrial robots and distinct mechanical faults to build an approach for classifying the faults using low-variance features extracted from the input signals. The presented approach was implemented on the practical test benches and demonstrated satisfactory performance in fault detection and diagnosis for simple and complex classification problems with a classification accuracy of 99.7% and 88.1%, respectively.
Holistic Fault Detection and Diagnosis System in Imbalanced, Scarce, Multi-Domain (ISMD) Data Setting for Component-Level Prognostics and Health Management (PHM)
Mar 18, 2022

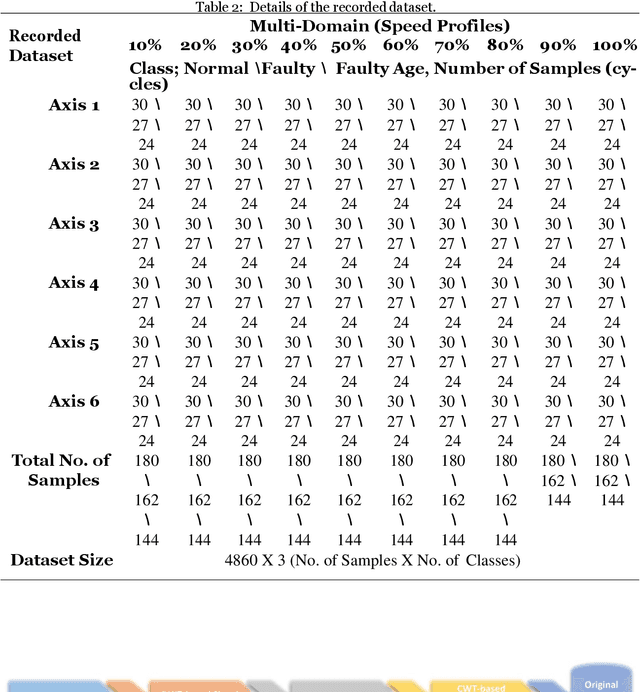
In the current Industrial 4.0 revolution, Prognostics and Health Management (PHM) is an emerging field of research. The difficulty of obtaining data from electromechanical systems in an industrial setting increases proportionally with the scale and accessibility of the automated industry, resulting in a less interpolated PHM system. To put it another way, the development of an accurate PHM system for each industrial system necessitates a unique dataset acquired under specified conditions. In most circumstances, obtaining this one-of-a-kind dataset is difficult, and the resulting dataset has a significant imbalance, a lack of certain useful information, and multi-domain knowledge. To address this, this paper provides a fault detection and diagnosis system that evaluates and pre-processes Imbalanced, Scarce, Multi-Domain (ISMD) data acquired from an industrial robot utilizing Signal Processing (SP) techniques and Deep Learning-based (DL) domain knowledge transfer. The domain knowledge transfer is used to produce a synthetic dataset with a high interpolation rate that contains all the useful information about each domain. For domain knowledge transfer and data generation, Continuous Wavelet Transform (CWT) with Generative Adversarial Network (GAN) was used, as well as Convolutional Neural Network (CNN) to test the suggested methodology using transfer learning and categorize several faults. The proposed methodology was tested on a real experimental bench that included an industrial robot created by Hyundai Robotics Co. This development resulted in a satisfactory resolution with 99.7% (highest) classification accuracy achieved by transfer learning on several CNN benchmark models.