 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Scattering Spectrum germaneness to Fault Detection and Diagnosis for Component-level Prognostics and Health Management (PHM)
Paper and Code
Oct 20, 2022
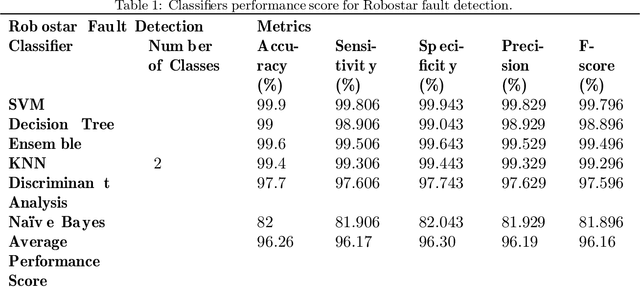
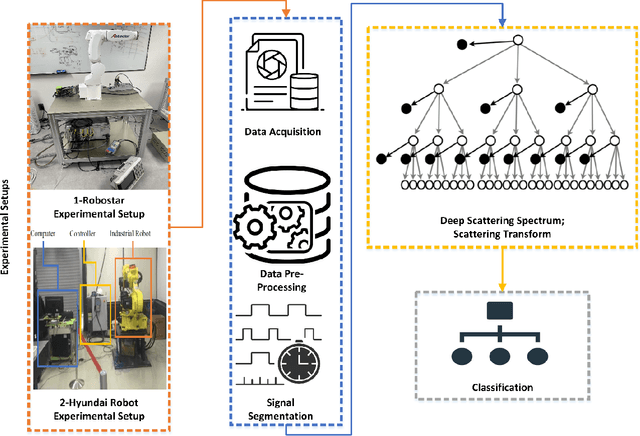
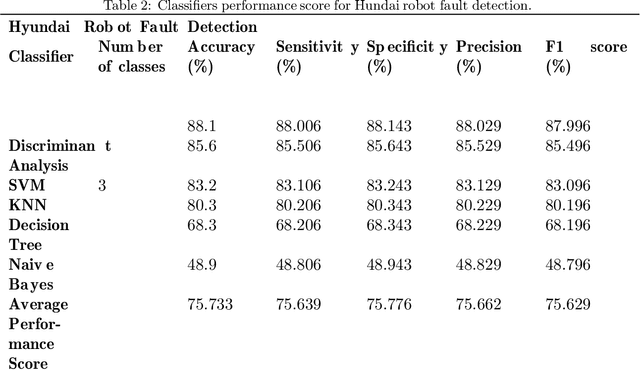
In fault detection and diagnosis of prognostics and health management (PHM) systems, most of the methodologies utilize machine learning (ML) or deep learning (DL) through which either some features are extracted beforehand (in the case of ML) or filters are used to extract features autonomously (in case of DL) to perform the critical classification task. Particularly in the fault detection and diagnosis of industrial robots where electric current, vibration or acoustic emissions signals are the primary sources of information, a feature domain that can map the signals into their constituent components with compressed information at different levels can reduce the complexities and size of typical ML and DL-based frameworks. The Deep Scattering Spectrum (DSS) is one of the strategies that use the Wavelet Transform (WT) analogy to separate and extract the information encoded in a signal's various temporal and frequency domains. As a result, the focus of this work is on the study of the DSS's relevance to fault detection and daignosis for mechanical components of industrail robots. We used multiple industrial robots and distinct mechanical faults to build an approach for classifying the faults using low-variance features extracted from the input signals. The presented approach was implemented on the practical test benches and demonstrated satisfactory performance in fault detection and diagnosis for simple and complex classification problems with a classification accuracy of 99.7% and 88.1%, respectively.