 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeaderless Swarm Formation Control: From Global Specifications to Local Control Laws
Apr 09, 2022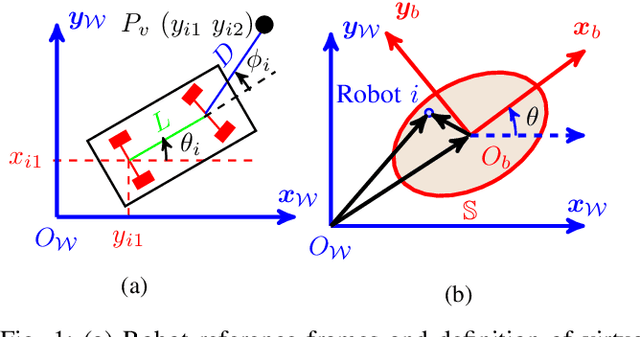
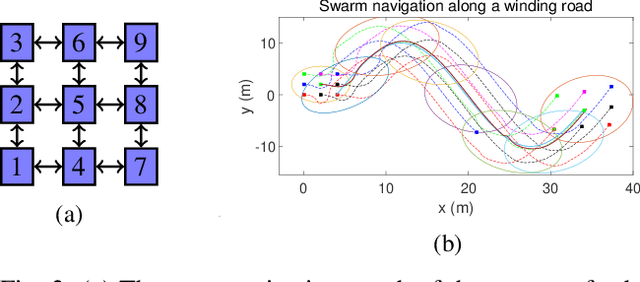
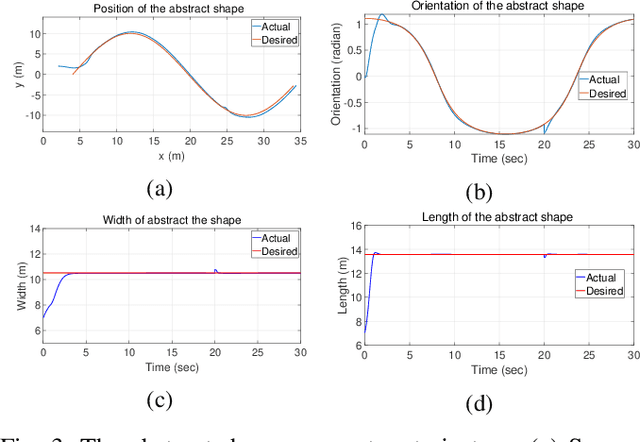
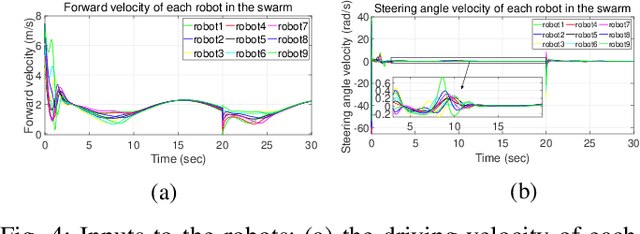
This paper introduces a distributed leaderless swarm formation control framework to address the problem of collectively driving a swarm of robots to track a time-varying formation. The swarm's formation is captured by the trajectory of an abstract shape that circumscribes the convex hull of robots' positions and is independent of the number of robots and their ordering in the swarm. For each robot in the swarm, given global specifications in terms of the trajectory of the abstract shape parameters, the proposed framework synthesizes a control law that steers the swarm to track the desired formation using the information available at the robot's local neighbors. For this purpose, we generate a suitable local reference trajectory that the robot controller tracks by solving the input-output linearization problem. Here, we select the swarm output to be the parameters of the abstract shape. For this purpose, we design a dynamic average consensus estimator to estimate the abstract shape parameters. The abstract shape parameters are used as the swarm state feedback to generate a suitable robot trajectory. We demonstrate the effectiveness and robustness of the proposed control framework by providing the simulation of coordinated collective navigation of a group of car-like robots in the presence of robots and communication link failures.
A Software Tool for Evaluating Unmanned Autonomous Systems
Nov 21, 2021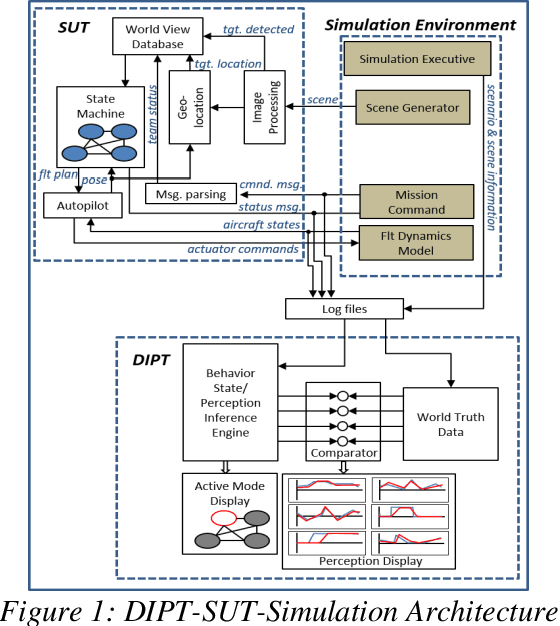
The North Carolina Agriculture and Technical State University (NC A&T) in collaboration with Georgia Tech Research Institute (GTRI) has developed methodologies for creating simulation-based technology tools that are capable of inferring the perceptions and behavioral states of autonomous systems. These methodologies have the potential to provide the Test and Evaluation (T&E) community at the Department of Defense (DoD) with a greater insight into the internal processes of these systems. The methodologies use only external observations and do not require complete knowledge of the internal processing of and/or any modifications to the system under test. This paper presents an example of one such simulation-based technology tool, named as the Data-Driven Intelligent Prediction Tool (DIPT). DIPT was developed for testing a multi-platform Unmanned Aerial Vehicle (UAV) system capable of conducting collaborative search missions. DIPT's Graphical User Interface (GUI) enables the testers to view the aircraft's current operating state, predicts its current target-detection status, and provides reasoning for exhibiting a particular behavior along with an explanation of assigning a particular task to it.
A Pedestrian Detection and Tracking Framework for Autonomous Cars: Efficient Fusion of Camera and LiDAR Data
Aug 27, 2021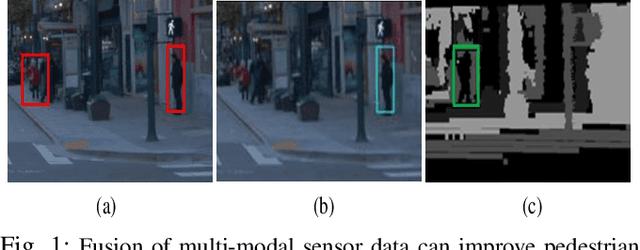
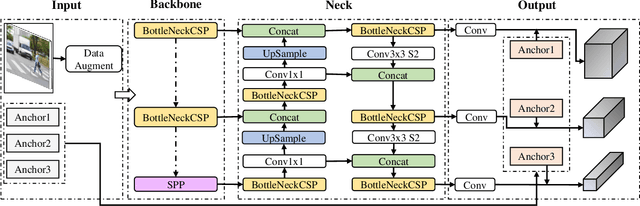
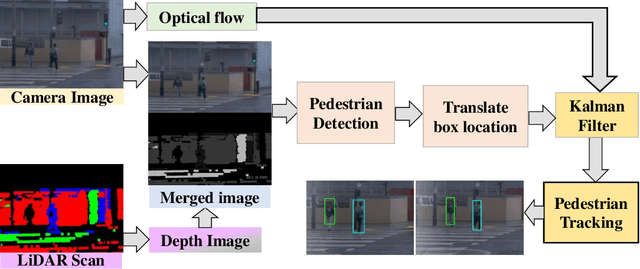
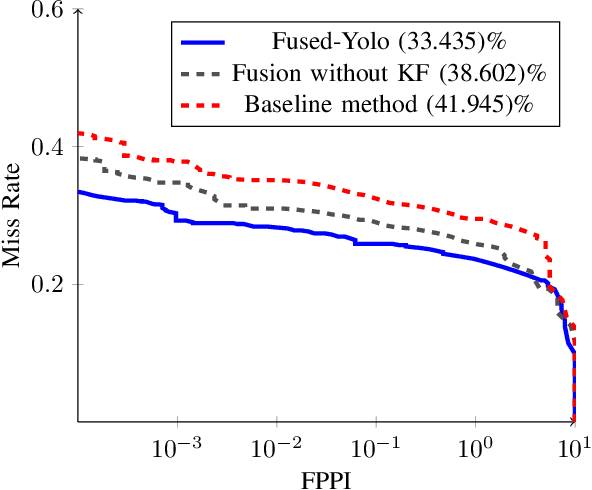
This paper presents a novel method for pedestrian detection and tracking by fusing camera and LiDAR sensor data. To deal with the challenges associated with the autonomous driving scenarios, an integrated tracking and detection framework is proposed. The detection phase is performed by converting LiDAR streams to computationally tractable depth images, and then, a deep neural network is developed to identify pedestrian candidates both in RGB and depth images. To provide accurate information, the detection phase is further enhanced by fusing multi-modal sensor information using the Kalman filter. The tracking phase is a combination of the Kalman filter prediction and an optical flow algorithm to track multiple pedestrians in a scene. We evaluate our framework on a real public driving dataset. Experimental results demonstrate that the proposed method achieves significant performance improvement over a baseline method that solely uses image-based pedestrian detection.
Design of a Smooth Landing Trajectory Tracking System for a Fixed-wing Aircraft
Jul 13, 2021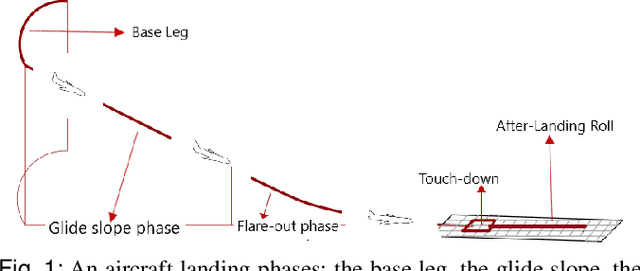
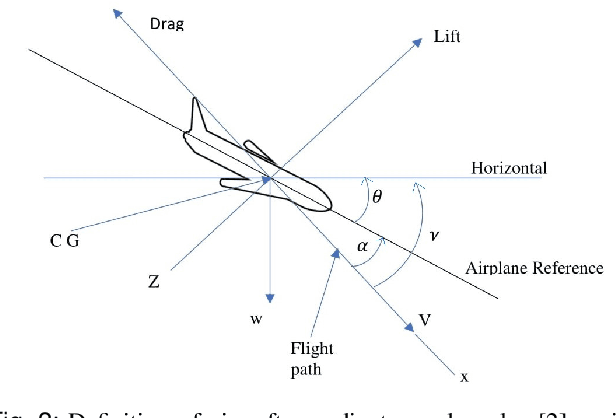
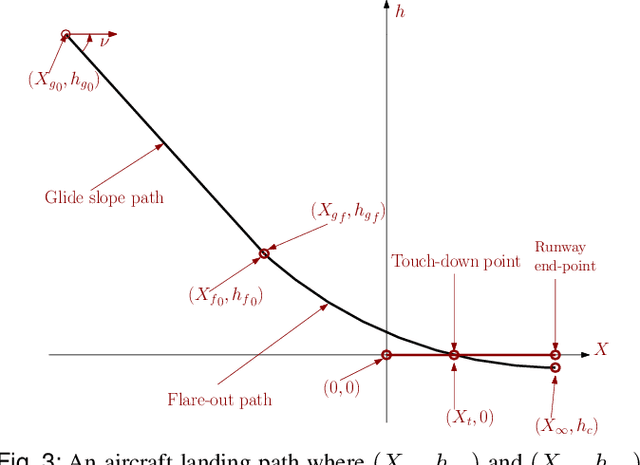
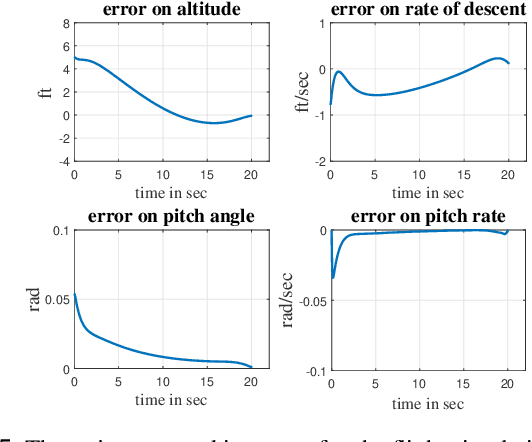
This paper presents a landing controller for a fixed-wing aircraft during the landing phase, ensuring the aircraft reaches the touchdown point smoothly. The landing problem is converted to a finite-time linear quadratic tracking (LQT) problem in which an aircraft needs to track the desired landing path in the longitudinal-vertical plane while satisfying performance requirements and flight constraints. First, we design a smooth trajectory that meets flight performance requirements and constraints. Then, an optimal controller is designed to minimize the tracking error, while landing the aircraft within the desired time frame. For this purpose, a linearized model of an aircraft developed under the assumption of a small flight path angle and a constant approach speed is used. The resulting Differential Riccati equation is solved backward in time using the Dormand Prince algorithm. Simulation results show a satisfactory tracking performance and the finite-time convergence of tracking errors for different initial conditions of the flare-out phase of landing.