 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of a Smooth Landing Trajectory Tracking System for a Fixed-wing Aircraft
Paper and Code
Jul 13, 2021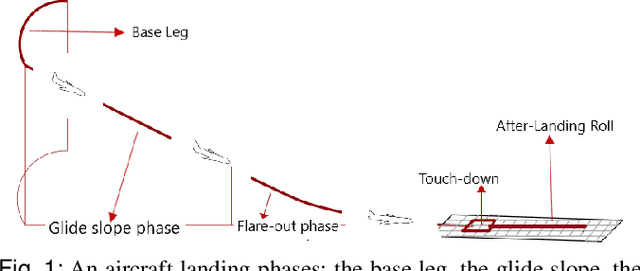
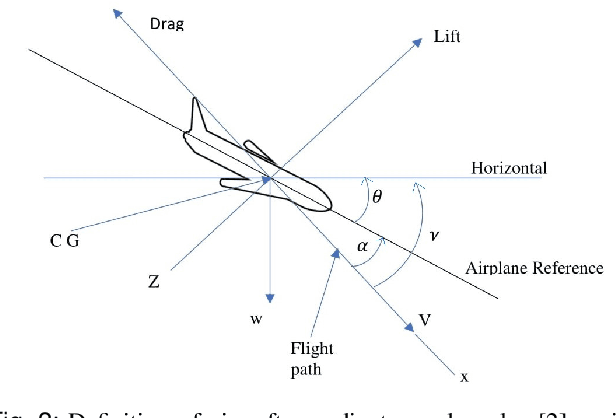
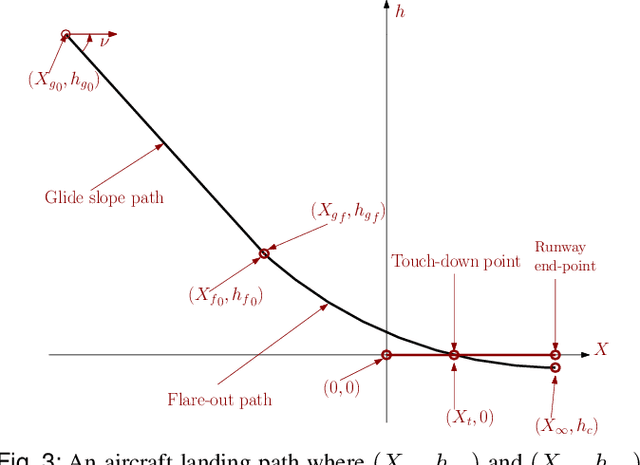
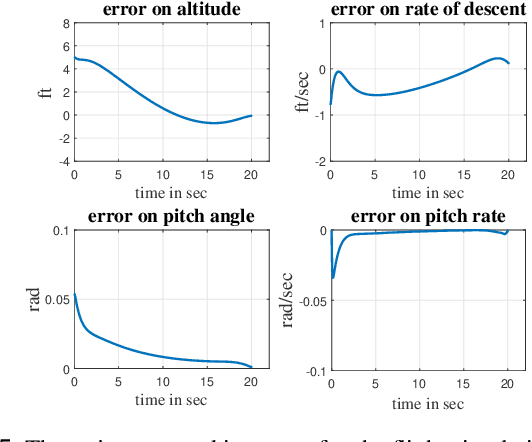
This paper presents a landing controller for a fixed-wing aircraft during the landing phase, ensuring the aircraft reaches the touchdown point smoothly. The landing problem is converted to a finite-time linear quadratic tracking (LQT) problem in which an aircraft needs to track the desired landing path in the longitudinal-vertical plane while satisfying performance requirements and flight constraints. First, we design a smooth trajectory that meets flight performance requirements and constraints. Then, an optimal controller is designed to minimize the tracking error, while landing the aircraft within the desired time frame. For this purpose, a linearized model of an aircraft developed under the assumption of a small flight path angle and a constant approach speed is used. The resulting Differential Riccati equation is solved backward in time using the Dormand Prince algorithm. Simulation results show a satisfactory tracking performance and the finite-time convergence of tracking errors for different initial conditions of the flare-out phase of landing.