 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOverview of Gaussian process based multi-fidelity techniques with variable relationship between fidelities
Jun 30, 2020

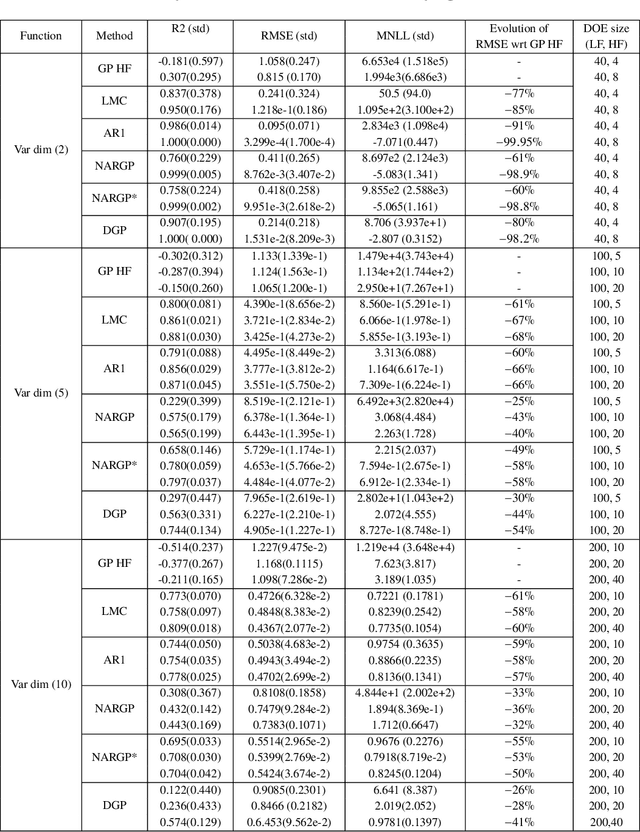

The design process of complex systems such as new configurations of aircraft or launch vehicles is usually decomposed in different phases which are characterized for instance by the depth of the analyses in terms of number of design variables and fidelity of the physical models. At each phase, the designers have to compose with accurate but computationally intensive models as well as cheap but inaccurate models. Multi-fidelity modeling is a way to merge different fidelity models to provide engineers with accurate results with a limited computational cost. Within the context of multi-fidelity modeling, approaches relying on Gaussian Processes emerge as popular techniques to fuse information between the different fidelity models. The relationship between the fidelity models is a key aspect in multi-fidelity modeling. This paper provides an overview of Gaussian process-based multi-fidelity modeling techniques for variable relationship between the fidelity models (e.g., linearity, non-linearity, variable correlation). Each technique is described within a unified framework and the links between the different techniques are highlighted. All the approaches are numerically compared on a series of analytical test cases and four aerospace related engineering problems in order to assess their benefits and disadvantages with respect to the problem characteristics.
Multi-fidelity modeling with different input domain definitions using Deep Gaussian Processes
Jun 29, 2020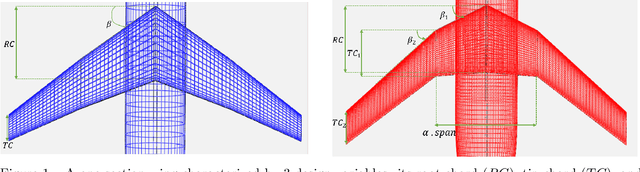
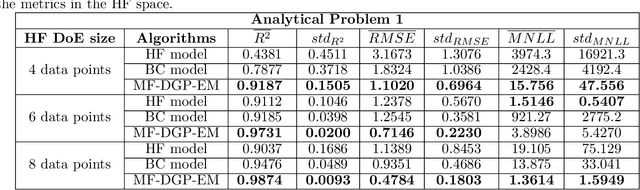
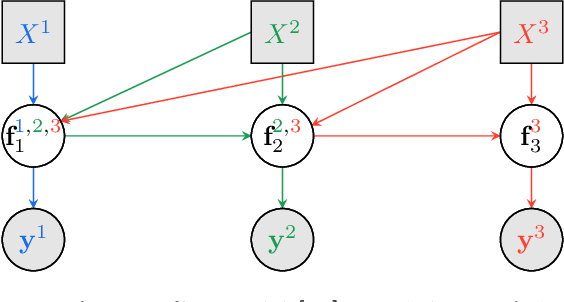
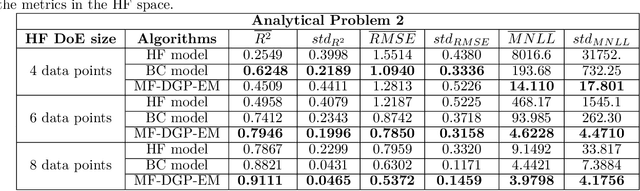
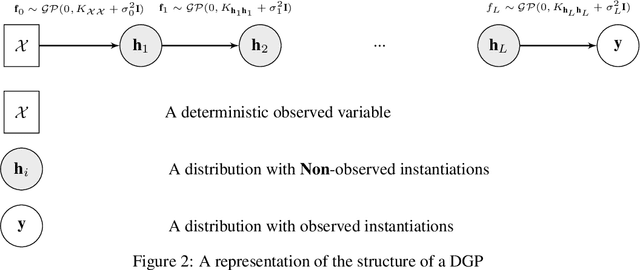
Multi-fidelity approaches combine different models built on a scarce but accurate data-set (high-fidelity data-set), and a large but approximate one (low-fidelity data-set) in order to improve the prediction accuracy. Gaussian Processes (GPs) are one of the popular approaches to exhibit the correlations between these different fidelity levels. Deep Gaussian Processes (DGPs) that are functional compositions of GPs have also been adapted to multi-fidelity using the Multi-Fidelity Deep Gaussian process model (MF-DGP). This model increases the expressive power compared to GPs by considering non-linear correlations between fidelities within a Bayesian framework. However, these multi-fidelity methods consider only the case where the inputs of the different fidelity models are defined over the same domain of definition (e.g., same variables, same dimensions). However, due to simplification in the modeling of the low-fidelity, some variables may be omitted or a different parametrization may be used compared to the high-fidelity model. In this paper, Deep Gaussian Processes for multi-fidelity (MF-DGP) are extended to the case where a different parametrization is used for each fidelity. The performance of the proposed multifidelity modeling technique is assessed on analytical test cases and on structural and aerodynamic real physical problems.
Bayesian Optimization using Deep Gaussian Processes
May 07, 2019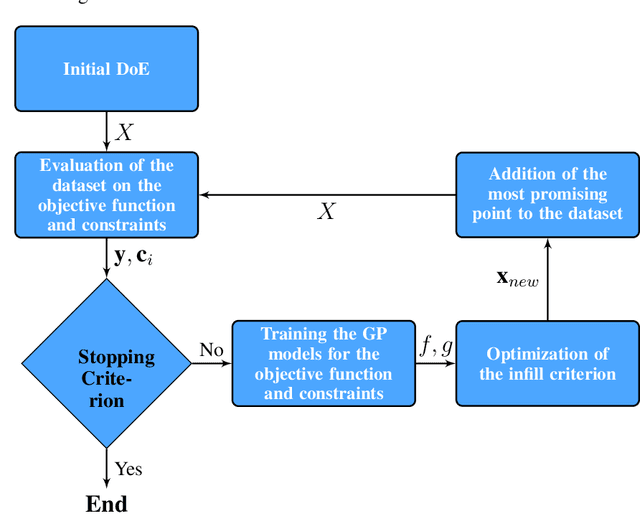
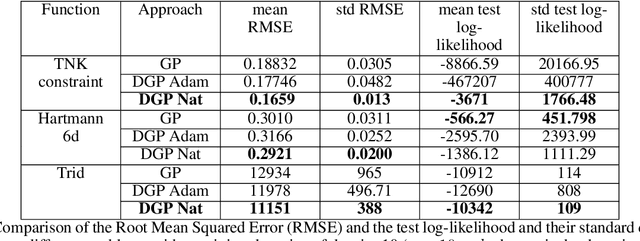
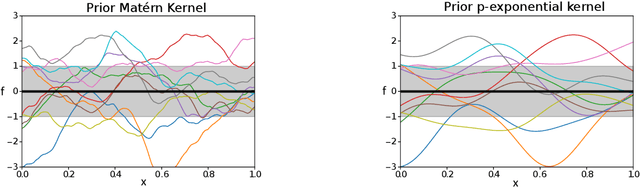
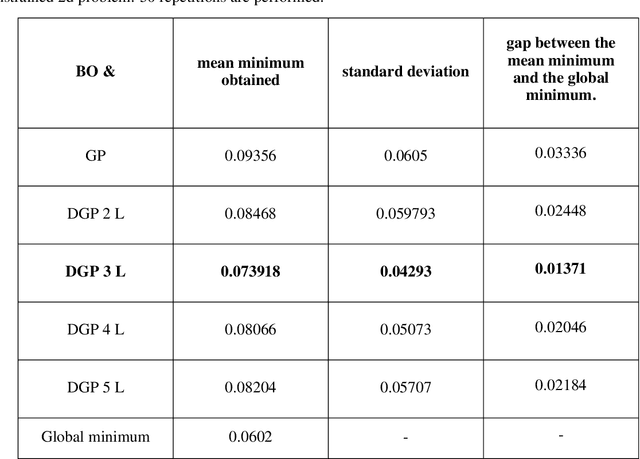
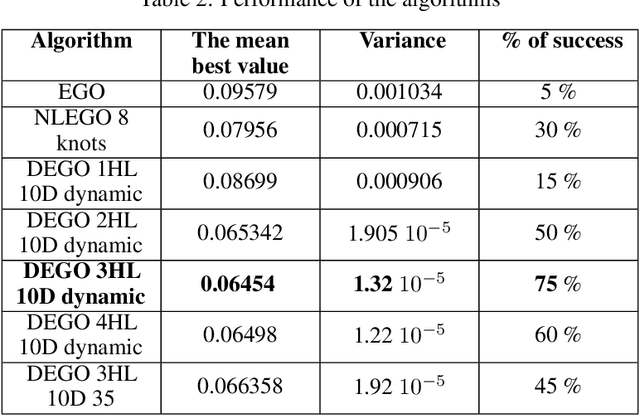
Bayesian Optimization using Gaussian Processes is a popular approach to deal with the optimization of expensive black-box functions. However, because of the a priori on the stationarity of the covariance matrix of classic Gaussian Processes, this method may not be adapted for non-stationary functions involved in the optimization problem. To overcome this issue, a new Bayesian Optimization approach is proposed. It is based on Deep Gaussian Processes as surrogate models instead of classic Gaussian Processes. This modeling technique increases the power of representation to capture the non-stationarity by simply considering a functional composition of stationary Gaussian Processes, providing a multiple layer structure. This paper proposes a new algorithm for Global Optimization by coupling Deep Gaussian Processes and Bayesian Optimization. The specificities of this optimization method are discussed and highlighted with academic test cases. The performance of the proposed algorithm is assessed on analytical test cases and an aerospace design optimization problem and compared to the state-of-the-art stationary and non-stationary Bayesian Optimization approaches.
Efficient Global Optimization using Deep Gaussian Processes
Sep 11, 2018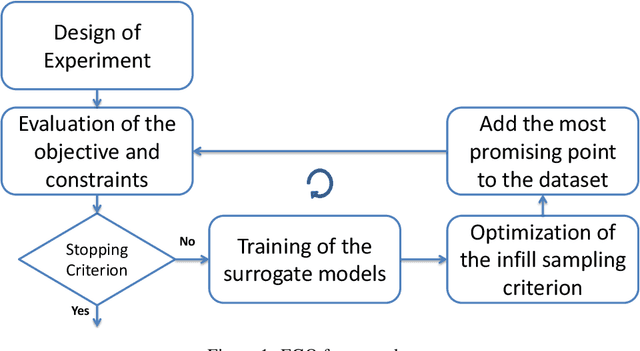
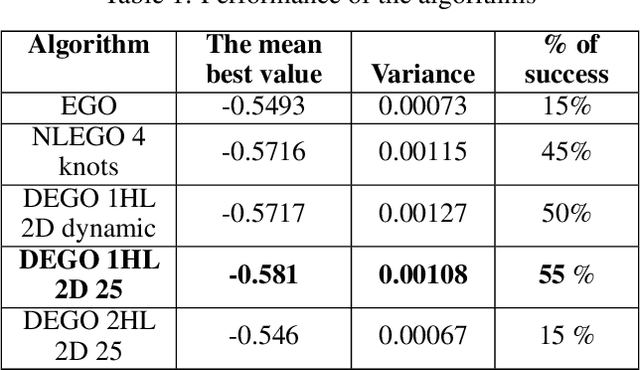
Efficient Global Optimization (EGO) is widely used for the optimization of computationally expensive black-box functions. It uses a surrogate modeling technique based on Gaussian Processes (Kriging). However, due to the use of a stationary covariance, Kriging is not well suited for approximating non stationary functions. This paper explores the integration of Deep Gaussian processes (DGP) in EGO framework to deal with the non-stationary issues and investigates the induced challenges and opportunities. Numerical experimentations are performed on analytical problems to highlight the different aspects of DGP and EGO.