 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Recommendation of Strategies for Minimizing Discomfort in Virtual Environments
Jun 27, 2020



Virtual reality (VR) is an imminent trend in games, education, entertainment, military, and health applications, as the use of head-mounted displays is becoming accessible to the mass market. Virtual reality provides immersive experiences but still does not offer an entirely perfect situation, mainly due to Cybersickness (CS) issues. In this work, we first present a detailed review about possible causes of CS. Following, we propose a novel CS prediction solution. Our system is able to suggest if the user may be entering in the next moments of the application into an illness situation. We use Random Forest classifiers, based on a dataset we have produced. The CSPQ (Cybersickness Profile Questionnaire) is also proposed, which is used to identify the player's susceptibility to CS and the dataset construction. In addition, we designed two immersive environments for empirical studies where participants are asked to complete the questionnaire and describe (orally) the degree of discomfort during their gaming experience. Our data was achieved through 84 individuals on different days, using VR devices. Our proposal also allows us to identify which are the most frequent attributes (causes) in the observed discomfort situations.
Efficient Computation of Collision Probabilities for Safe Motion Planning
Apr 15, 2018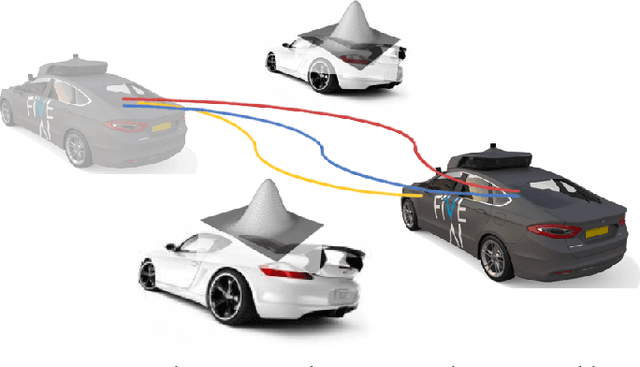

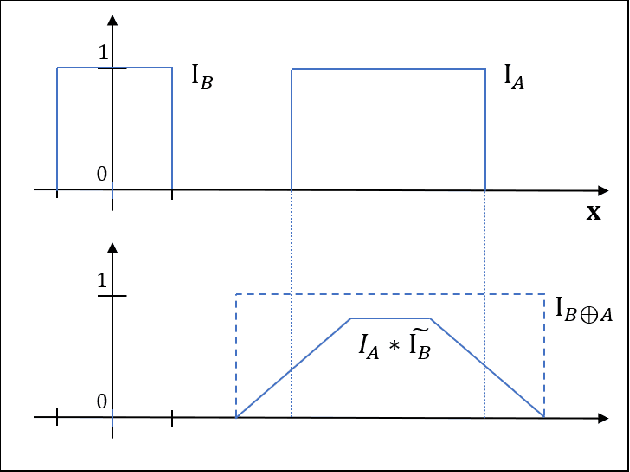
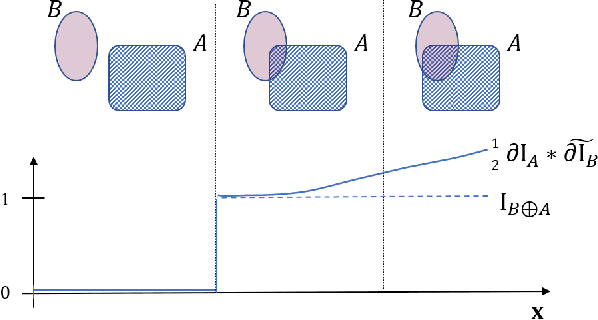
We address the problem of safe motion planning. As mobile robots and autonomous vehicles become increasingly more prevalent in human-centered environments, the need to ensure safety in the sense of guaranteed collision free behaviour has taken renewed urgency. Achieving this when perceptual modules provide only noisy estimates of objects in the environment requires new approaches. Working within a probabilistic framework for describing the environment, we present methods for efficiently calculating a probabilistic risk of collision for a candidate path. This may be used to stratify a set of candidate trajectories by levels of a safety threshold. Given such a stratification, based on user-defined thresholds, motion synthesis techniques could optimise for secondary criteria with the assurance that a primary safety criterion is already being satisfied. A key contribution of this paper is the use of a `convolution trick' to factor the calculation of integrals providing bounds on collision risk, enabling an $O(1)$ computation even in cluttered and complex environments.