 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Real-World Traffic Data to Relevant Critical Scenarios
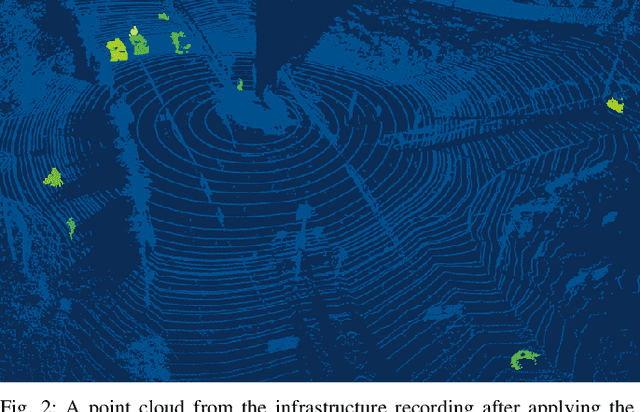
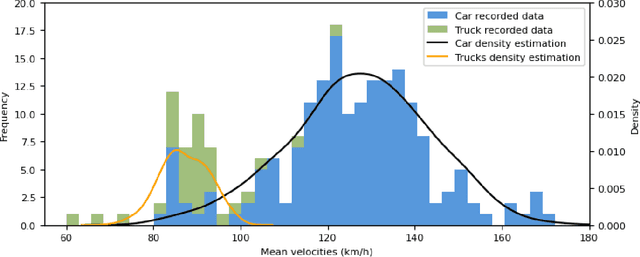
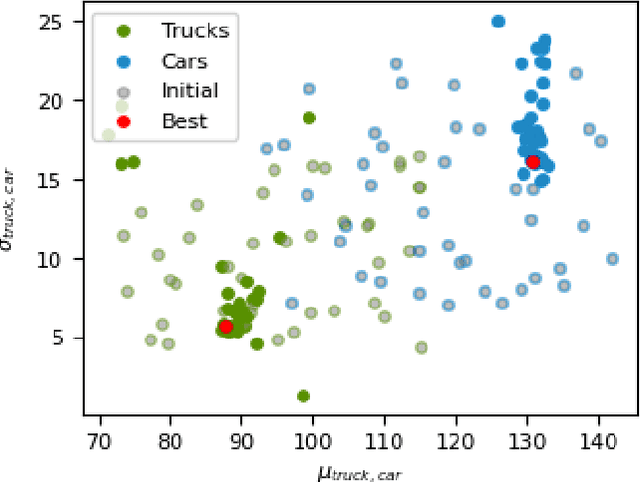
Dec 08, 2025The reliable operation of autonomous vehicles, automated driving functions, and advanced driver assistance systems across a wide range of relevant scenarios is critical for their development and deployment. Identifying a near-complete set of relevant driving scenarios for such functionalities is challenging due to numerous degrees of freedom involved, each affecting the outcomes of the driving scenario differently. Moreover, with increasing technical complexity of new functionalities, the number of potentially relevant, particularly "unknown unsafe" scenarios is increasing. To enhance validation efficiency, it is essential to identify relevant scenarios in advance, starting with simpler domains like highways before moving to more complex environments such as urban traffic. To address this, this paper focuses on analyzing lane change scenarios in highway traffic, which involve multiple degrees of freedom and present numerous safetyrelevant scenarios. We describe the process of data acquisition and processing of real-world data from public highway traffic, followed by the application of criticality measures on trajectory data to evaluate scenarios, as conducted within the AVEAS project (www.aveas.org). By linking the calculated measures to specific lane change driving scenarios and the conditions under which the data was collected, we facilitate the identification of safetyrelevant driving scenarios for various applications. Further, to tackle the extensive range of "unknown unsafe" scenarios, we propose a way to generate relevant scenarios by creating synthetic scenarios based on recorded ones. Consequently, we demonstrate and evaluate a processing chain that enables the identification of safety-relevant scenarios, the development of data-driven methods for extracting these scenarios, and the generation of synthetic critical scenarios via sampling on highways.
Evaluation of Sparse Acoustic Array Geometries for the Application in Indoor Localization
Jun 13, 2024



Angle-of-Arrival estimation technology, with its potential advantages, emerges as an intriguing choice for indoor localization. Notably, it holds the promise of reducing installation costs. In contrast to ToF/TDoA based systems, AoA-based approaches require a reduced number of nodes for effective localization. This characteristic establishes a trade-off between installation costs and the complexity of hardware and software. Moreover, the appeal of acoustic localization is further heightened by its capacity to provide cost-effective hardware solutions while maintaining a high degree of accuracy. Consequently, acoustic AoA estimation technology stands out as a feasible and compelling option in the field of indoor localization. Sparse arrays additionally have the ability to estimate the DoA of more sources than available sensors by placing sensors in a specific geometry. In this contribution, we introduce a measurement platform designed to evaluate various sparse array geometries experimentally. The acoustic microphone array comprises 64 microphones arranged in an 8x8 grid, following an Uniform Rectangular Array (URA) configuration, with a grid spacing of 8.255 mm. This configuration achieves a spatial Nyquist frequency of approximately 20.8 kHz in the acoustic domain at room temperature. Notably, the array exhibits a mean spherical error of 1.26{\deg} when excluding higher elevation angles. The platform allows for masking sensors to simulate sparse array configurations. We assess four array geometries through simulations and experimental data, identifying the Open-Box and Nested array geometries as robust candidates. Additionally, we demonstrate the array's capability to concurrently estimate the directions of three emitting sources using experimental data, employing waveforms consisting of orthogonal codes.
An Approach to Systematic Data Acquisition and Data-Driven Simulation for the Safety Testing of Automated Driving Functions
May 02, 2024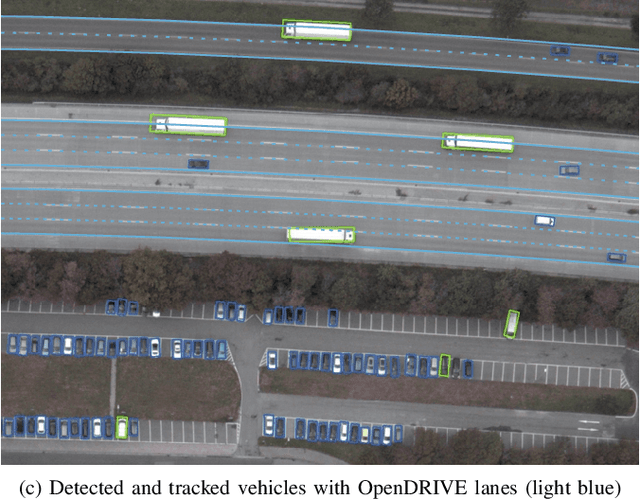
With growing complexity and criticality of automated driving functions in road traffic and their operational design domains (ODD), there is increasing demand for covering significant proportions of development, validation, and verification in virtual environments and through simulation models. If, however, simulations are meant not only to augment real-world experiments, but to replace them, quantitative approaches are required that measure to what degree and under which preconditions simulation models adequately represent reality, and thus, using their results accordingly. Especially in R&D areas related to the safety impact of the "open world", there is a significant shortage of real-world data to parameterize and/or validate simulations - especially with respect to the behavior of human traffic participants, whom automated driving functions will meet in mixed traffic. We present an approach to systematically acquire data in public traffic by heterogeneous means, transform it into a unified representation, and use it to automatically parameterize traffic behavior models for use in data-driven virtual validation of automated driving functions.