 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to Drawjectory? -- Trajectory Planning using Programming by Demonstration
Nov 06, 2024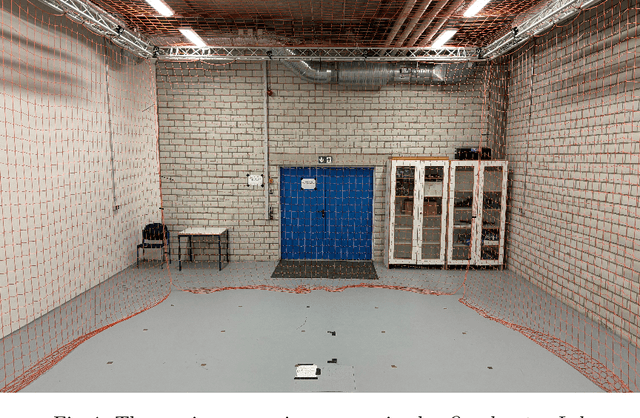
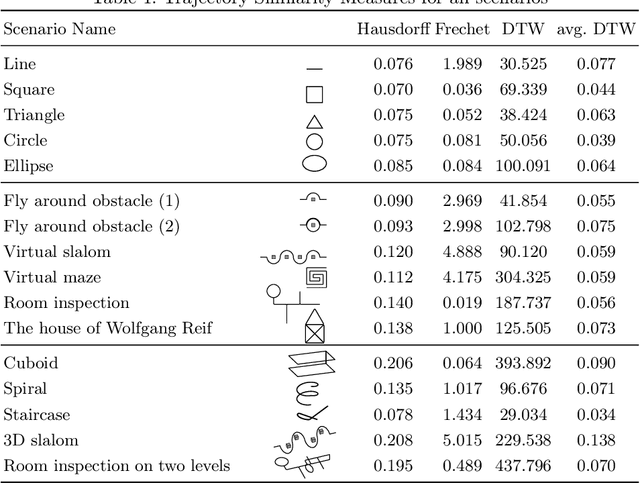
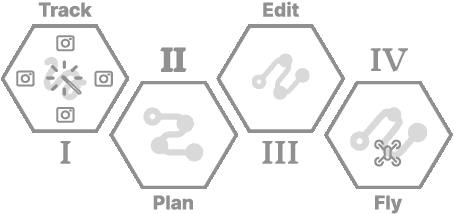

A flight trajectory defines how exactly a quadrocopter moves in the three-dimensional space from one position to another. Automatic flight trajectory planning faces challenges such as high computational effort and a lack of precision. Hence, when low computational effort or precise control is required, programming the flight route trajectory manually might be preferable. However, this requires in-depth knowledge of how to accurately plan flight trajectories in three-dimensional space. We propose planning quadrocopter flight trajectories manually using the Programming by Demonstration (PbD) approach -- simply drawing the trajectory in the three-dimensional space by hand. This simplifies the planning process and reduces the level of in-depth knowledge required. We implemented the approach in the context of the Quadcopter Lab at Ulm University. In order to evaluate our approach, we compare the precision and accuracy of the trajectories drawn by a user using our approach as well as the required time with those manually programmed using a domain specific language. The evaluation shows that the Drawjectory workflow is, on average, 78.7 seconds faster without a significant loss of precision, shown by an average deviation 6.67 cm.
Streamlining Attack Tree Generation: A Fragment-Based Approach
Oct 01, 2023



Attack graphs are a tool for analyzing security vulnerabilities that capture different and prospective attacks on a system. As a threat modeling tool, it shows possible paths that an attacker can exploit to achieve a particular goal. However, due to the large number of vulnerabilities that are published on a daily basis, they have the potential to rapidly expand in size. Consequently, this necessitates a significant amount of resources to generate attack graphs. In addition, generating composited attack models for complex systems such as self-adaptive or AI is very difficult due to their nature to continuously change. In this paper, we present a novel fragment-based attack graph generation approach that utilizes information from publicly available information security databases. Furthermore, we also propose a domain-specific language for attack modeling, which we employ in the proposed attack graph generation approach. Finally, we present a demonstrator example showcasing the attack generator's capability to replicate a verified attack chain, as previously confirmed by security experts.
Towards Model Co-evolution Across Self-Adaptation Steps for Combined Safety and Security Analysis
Sep 18, 2023
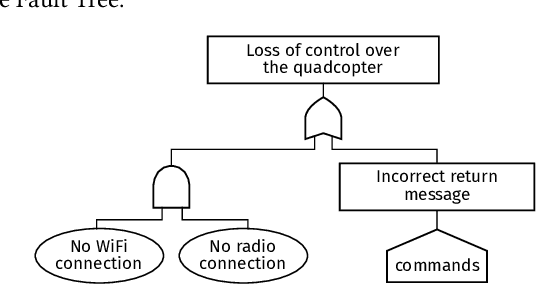
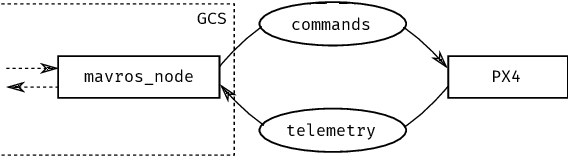
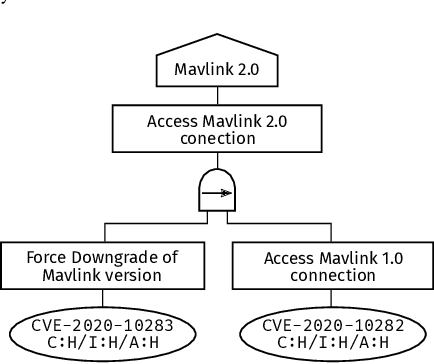
Self-adaptive systems offer several attack surfaces due to the communication via different channels and the different sensors required to observe the environment. Often, attacks cause safety to be compromised as well, making it necessary to consider these two aspects together. Furthermore, the approaches currently used for safety and security analysis do not sufficiently take into account the intermediate steps of an adaptation. Current work in this area ignores the fact that a self-adaptive system also reveals possible vulnerabilities (even if only temporarily) during the adaptation. To address this issue, we propose a modeling approach that takes into account the different relevant aspects of a system, its adaptation process, as well as safety hazards and security attacks. We present several models that describe different aspects of a self-adaptive system and we outline our idea of how these models can then be combined into an Attack-Fault Tree. This allows modeling aspects of the system on different levels of abstraction and co-evolve the models using transformations according to the adaptation of the system. Finally, analyses can then be performed as usual on the resulting Attack-Fault Tree.