 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to Drawjectory? -- Trajectory Planning using Programming by Demonstration
Nov 06, 2024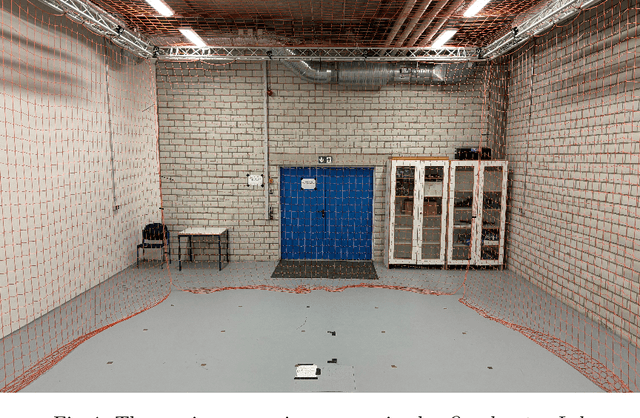

A flight trajectory defines how exactly a quadrocopter moves in the three-dimensional space from one position to another. Automatic flight trajectory planning faces challenges such as high computational effort and a lack of precision. Hence, when low computational effort or precise control is required, programming the flight route trajectory manually might be preferable. However, this requires in-depth knowledge of how to accurately plan flight trajectories in three-dimensional space. We propose planning quadrocopter flight trajectories manually using the Programming by Demonstration (PbD) approach -- simply drawing the trajectory in the three-dimensional space by hand. This simplifies the planning process and reduces the level of in-depth knowledge required. We implemented the approach in the context of the Quadcopter Lab at Ulm University. In order to evaluate our approach, we compare the precision and accuracy of the trajectories drawn by a user using our approach as well as the required time with those manually programmed using a domain specific language. The evaluation shows that the Drawjectory workflow is, on average, 78.7 seconds faster without a significant loss of precision, shown by an average deviation 6.67 cm.