 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePOA: Passable Obstacles Aware Path-planning Algorithm for Navigation of a Two-wheeled Robot in Highly Cluttered Environments
Jul 16, 2023This paper focuses on Passable Obstacles Aware (POA) planner - a novel navigation method for two-wheeled robots in a highly cluttered environment. The navigation algorithm detects and classifies objects to distinguish two types of obstacles - passable and unpassable. Our algorithm allows two-wheeled robots to find a path through passable obstacles. Such a solution helps the robot working in areas inaccessible to standard path planners and find optimal trajectories in scenarios with a high number of objects in the robot's vicinity. The POA planner can be embedded into other planning algorithms and enables them to build a path through obstacles. Our method decreases path length and the total travel time to the final destination up to 43% and 39%, respectively, comparing to standard path planners such as GVD, A*, and RRT*
Bulbar ALS Detection Based on Analysis of Voice Perturbation and Vibrato
Mar 24, 2020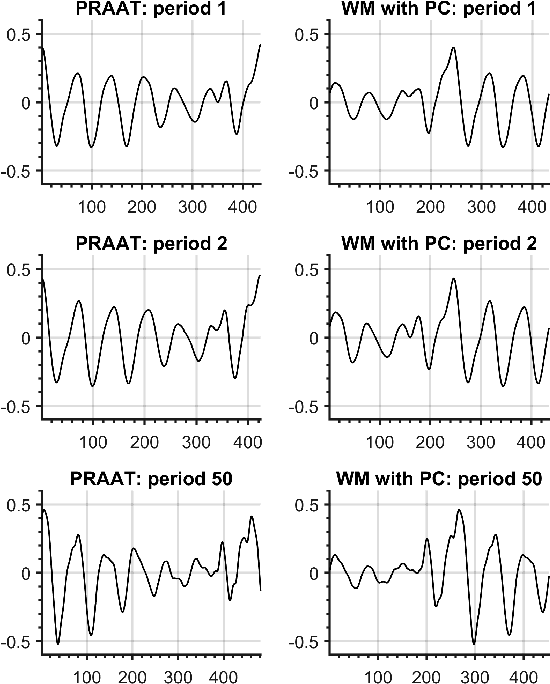
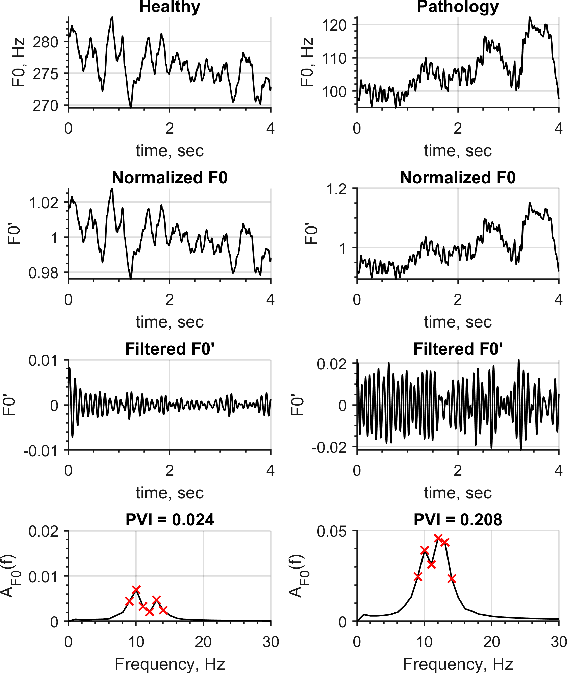
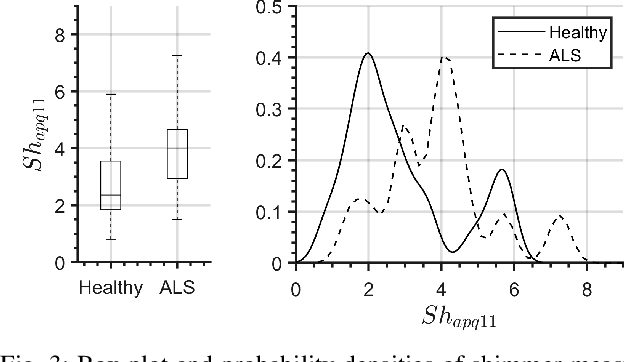
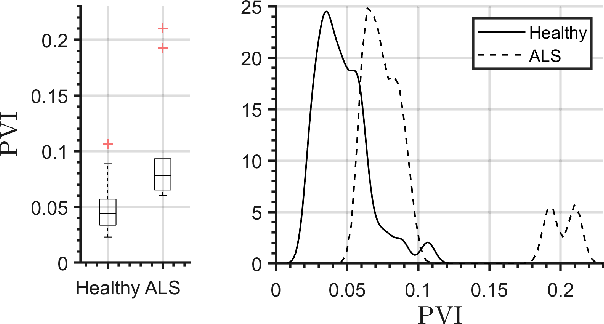
On average the lack of biological markers causes a one year diagnostic delay to detect amyotrophic lateral sclerosis (ALS). To improve the diagnostic process an automatic voice assessment based on acoustic analysis can be used. The purpose of this work was to verify the sutability of the sustain vowel phonation test for automatic detection of patients with ALS. We proposed enhanced procedure for separation of voice signal into fundamental periods that requires for calculation of perturbation measurements (such as jitter and shimmer). Also we proposed method for quantitative assessment of pathological vibrato manifestations in sustain vowel phonation. The study's experiments show that using the proposed acoustic analysis methods, the classifier based on linear discriminant analysis attains 90.7\% accuracy with 86.7\% sensitivity and 92.2\% specificity.