 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimators and Performance Bounds for Short Periodic Pulses
May 27, 2025In many industrial applications, signals with short periodic pulses, caused by repeated steps in the manufacturing process, are present, and their fundamental frequency or period may be of interest. Fundamental frequency estimation is in many cases performed by describing the periodic signal as a multiharmonic signal and employing the corresponding maximum likelihood estimator. However, since signals with short periodic pulses contain a large number of noise-only samples, the multiharmonic signal model is not optimal to describe them. In this work, two models of short periodic pulses with known and unknown pulse shape are considered. For both models, the corresponding maximum likelihood estimators, Fisher information matrices, and approximate Cram\'er-Rao lower bounds are presented. Numerical results demonstrate that the proposed estimators outperform the maximum likelihood estimator based on the multiharmonic signal model for low signal-to-noise ratios.
ReFlow6D: Refraction-Guided Transparent Object 6D Pose Estimation via Intermediate Representation Learning
Dec 30, 2024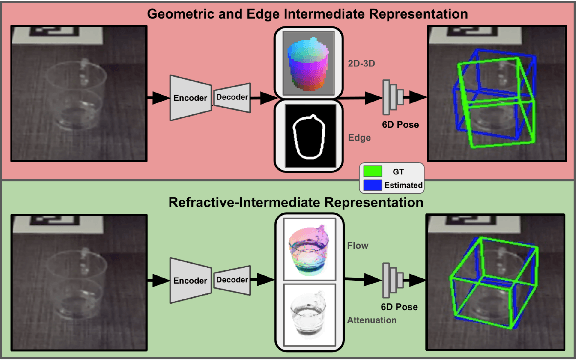
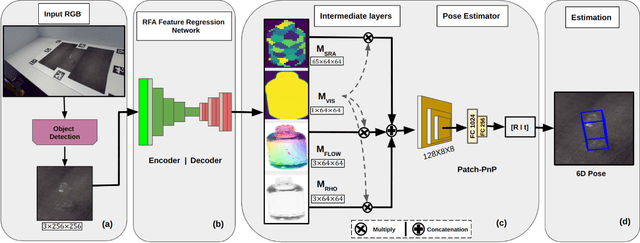
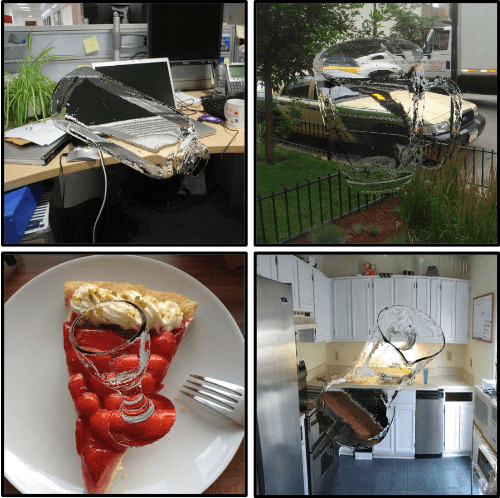
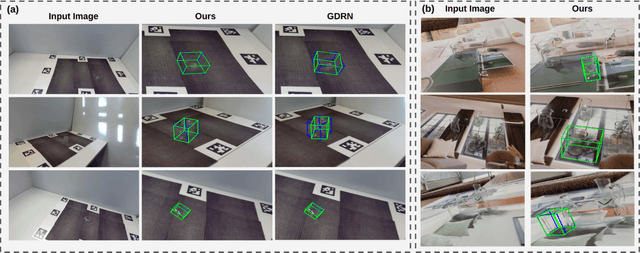
Transparent objects are ubiquitous in daily life, making their perception and robotics manipulation important. However, they present a major challenge due to their distinct refractive and reflective properties when it comes to accurately estimating the 6D pose. To solve this, we present ReFlow6D, a novel method for transparent object 6D pose estimation that harnesses the refractive-intermediate representation. Unlike conventional approaches, our method leverages a feature space impervious to changes in RGB image space and independent of depth information. Drawing inspiration from image matting, we model the deformation of the light path through transparent objects, yielding a unique object-specific intermediate representation guided by light refraction that is independent of the environment in which objects are observed. By integrating these intermediate features into the pose estimation network, we show that ReFlow6D achieves precise 6D pose estimation of transparent objects, using only RGB images as input. Our method further introduces a novel transparent object compositing loss, fostering the generation of superior refractive-intermediate features. Empirical evaluations show that our approach significantly outperforms state-of-the-art methods on TOD and Trans32K-6D datasets. Robot grasping experiments further demonstrate that ReFlow6D's pose estimation accuracy effectively translates to real-world robotics task. The source code is available at: https://github.com/StoicGilgamesh/ReFlow6D and https://github.com/StoicGilgamesh/matting_rendering.
Robustness of Explainable Artificial Intelligence in Industrial Process Modelling
Jul 12, 2024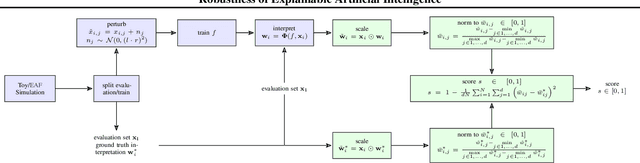

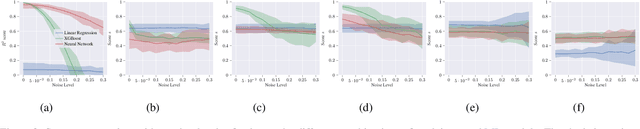

eXplainable Artificial Intelligence (XAI) aims at providing understandable explanations of black box models. In this paper, we evaluate current XAI methods by scoring them based on ground truth simulations and sensitivity analysis. To this end, we used an Electric Arc Furnace (EAF) model to better understand the limits and robustness characteristics of XAI methods such as SHapley Additive exPlanations (SHAP), Local Interpretable Model-agnostic Explanations (LIME), as well as Averaged Local Effects (ALE) or Smooth Gradients (SG) in a highly topical setting. These XAI methods were applied to various types of black-box models and then scored based on their correctness compared to the ground-truth sensitivity of the data-generating processes using a novel scoring evaluation methodology over a range of simulated additive noise. The resulting evaluation shows that the capability of the Machine Learning (ML) models to capture the process accurately is, indeed, coupled with the correctness of the explainability of the underlying data-generating process. We furthermore show the differences between XAI methods in their ability to correctly predict the true sensitivity of the modeled industrial process.