 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Control of Roller Grasper V2 for In-Hand Manipulation
Apr 18, 2020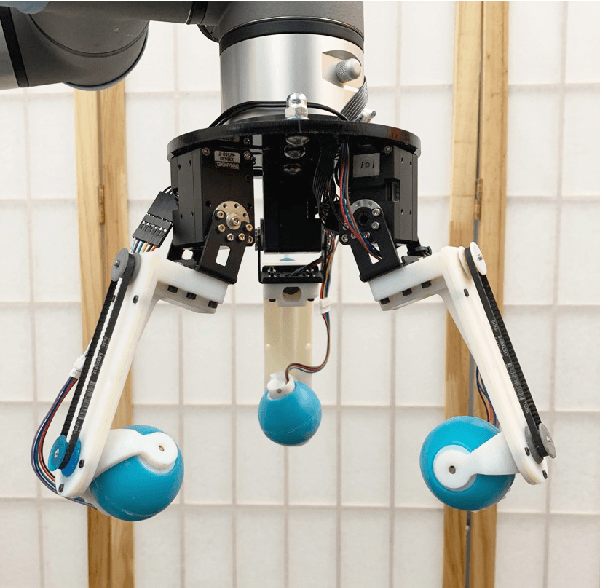
The ability to perform in-hand manipulation still remains an unsolved problem; having this capability would allow robots to perform sophisticated tasks requiring repositioning and reorienting of grasped objects. In this work, we present a novel non-anthropomorphic robot grasper with the ability to manipulate objects by means of active surfaces at the fingertips. Active surfaces are achieved by spherical rolling finger tips with two degrees of freedom (DoF) -- a pivoting motion for surface reorientation -- and a continuous rolling motion for moving the object. A further DoF is in the base of each finger, allowing the fingers to grasp objects over a range of size and shapes. Instantaneous kinematics was derived and objects were successfully manipulated both with a custom hard-coded control scheme as well as one learned through imitation learning, in simulation and experimentally on the hardware.