 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA low-cost wave-solar powered Unmanned Surface Vehicle
Dec 07, 2021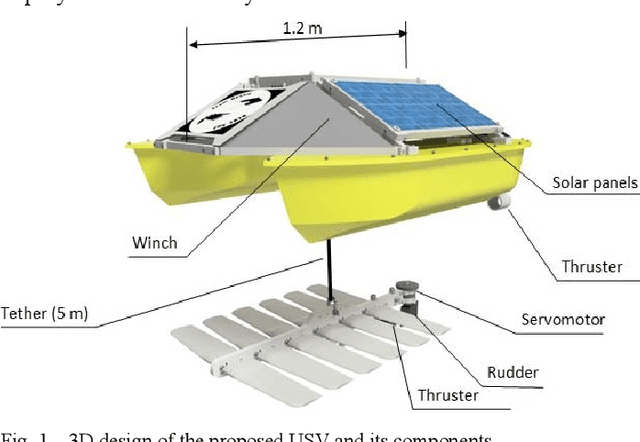


This paper presents a prototype of a low-cost Unmanned Surface Vehicle (USV) that is operated by wave and solar energy which can be used to minimize the cost of ocean data collection. The current prototype is a compact USV, with a length of 1.2m that can be deployed and recovered by two persons. The design includes an electrically operated winch that can be used to retract and lower the underwater unit. Several elements of the design make use of additive manufacturing and inexpensive materials. The vehicle can be controlled using radio frequency (RF) and a satellite communication, through a custom developed web application. Both the surface and underwater units were optimized with regard to drag, lift, weight, and price by using recommendation of previous research work and advanced materials. The USV could be used in water condition monitoring by measuring several parameters, such as dissolved oxygen, salinity, temperature, and pH.
A Deep Learning Approach To Dead-Reckoning Navigation For Autonomous Underwater Vehicles With Limited Sensor Payloads
Oct 01, 2021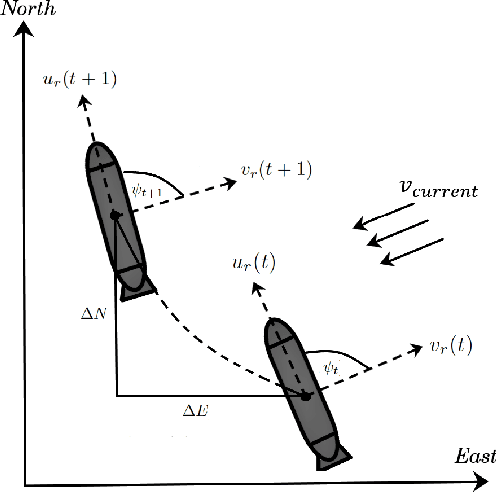
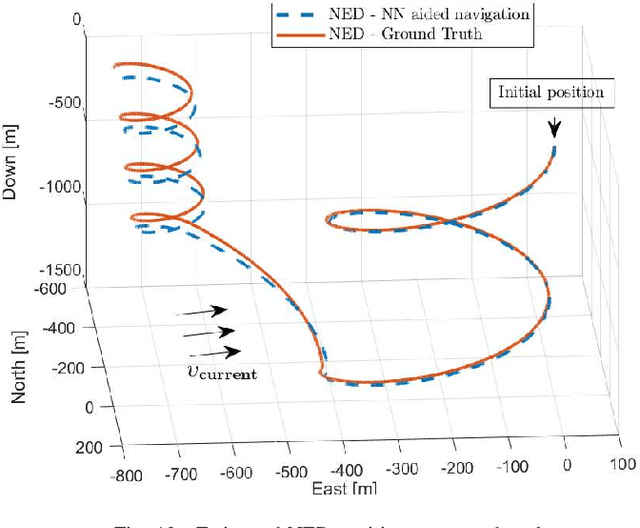


This paper presents a deep learning approach to aid dead-reckoning (DR) navigation using a limited sensor suite. A Recurrent Neural Network (RNN) was developed to predict the relative horizontal velocities of an Autonomous Underwater Vehicle (AUV) using data from an IMU, pressure sensor, and control inputs. The RNN network is trained using experimental data, where a doppler velocity logger (DVL) provided ground truth velocities. The predictions of the relative velocities were implemented in a dead-reckoning algorithm to approximate north and east positions. The studies in this paper were twofold I) Experimental data from a Long-Range AUV was investigated. Datasets from a series of surveys in Monterey Bay, California (U.S) were used to train and test the RNN network. II) The second study explore datasets generated by a simulated autonomous underwater glider. Environmental variables e.g ocean currents were implemented in the simulation to reflect real ocean conditions. The proposed neural network approach to DR navigation was compared to the on-board navigation system and ground truth simulated positions.
Towards autonomous ocean observing systems using Miniature Underwater Gliders with UAV deployment and recovery capabilities
Feb 08, 2019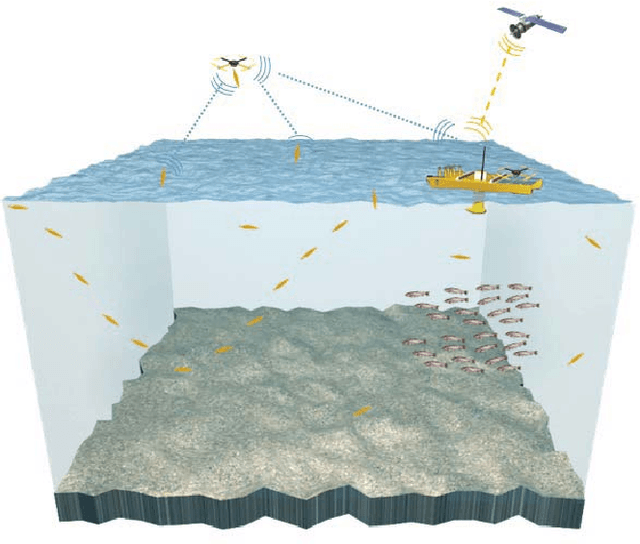

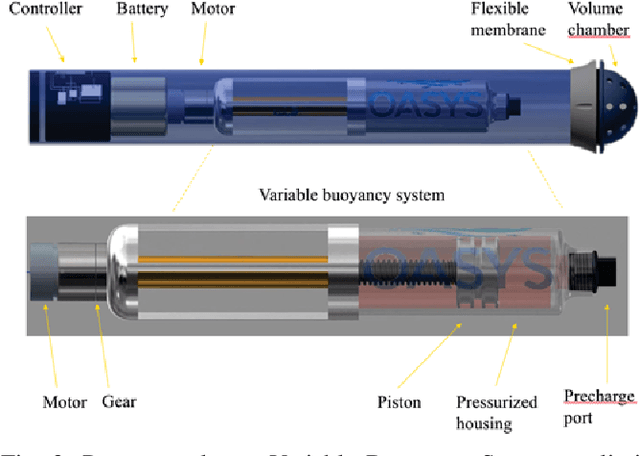
This paper presents preliminary results towards the development of an autonomous ocean observing system using Miniature Underwater Gliders (MUGs) that can operate with the support of Unmanned Aerial Vehicles (UAVs) and Unmanned Surface Vessels (USVs) for deployment, recovery, battery charging, and communication relay. The system reduces human intervention to the minimum, revolutionizing the affordability of a broad range of surveillance and data collection operations. The MUGs are equipped with a small Variable Buoyancy System (VBS) composed of a gas filled piston and a linear actuator powered by brushless DC motor and a rechargable lithium ion battery in an oil filled flexible enclosure. By using a fully pressure tolerant electronic design the aim is to reduce the total complexity, weight, and cost of the overall system. A first prototype of the VBS was built and demonstrated in a small aquarium. The electronic components were tested in a pressure testing facility to a minimum of 20bar. Preliminary results are promising and future work will focus on system and weight optimization, UAV deployment/recovery strategies, as well as sea trials to an operating depth of 200m.
Achieving Connectivity Between Wide Areas Through Self-Organising Robot Swarm Using Embodied Evolution
Jul 12, 2018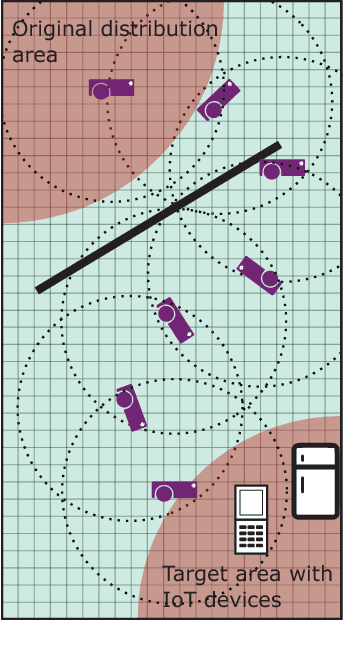
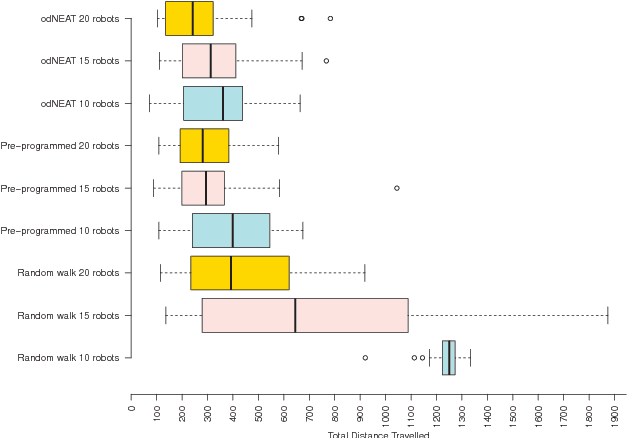
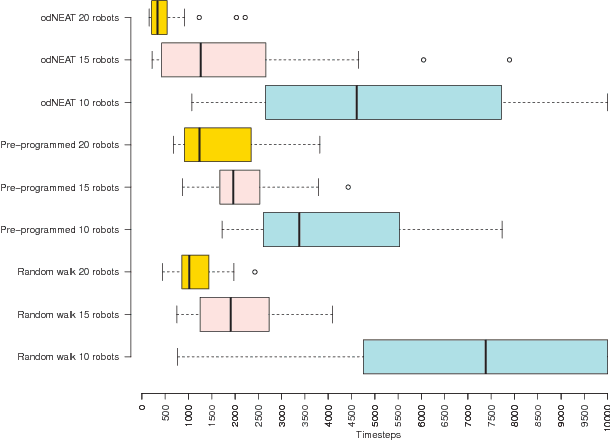
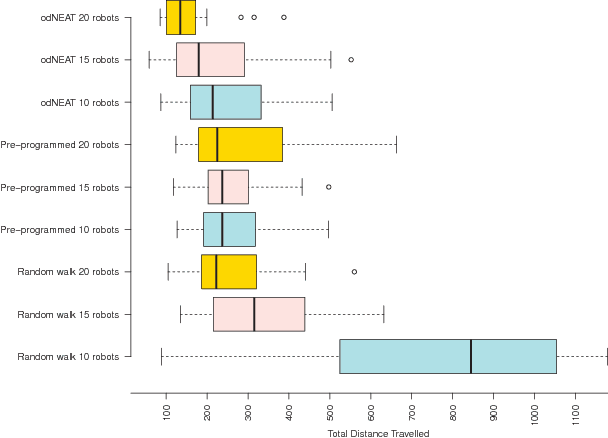
Abruptions to the communication infrastructure happens occasionally, where manual dedicated personnel will go out to fix the interruptions, restoring communication abilities. However, sometimes this can be dangerous to the personnel carrying out the task, which can be the case in war situations, environmental disasters like earthquakes or toxic spills or in the occurrence of fire. Therefore, human casualties can be minimised if autonomous robots are deployed that can achieve the same outcome: to establish a communication link between two previously distant but connected sites. In this paper we investigate the deployment of mobile ad hoc robots which relay traffic between them. In order to get the robots to locate themselves appropriately, we take inspiration from self-organisation and emergence in artificial life, where a common overall goal may be achieved if the correct local rules on the agents in system are invoked. We integrate the aspect of connectivity between two sites into the multirobot simulation platform known as JBotEvolver. The robot swarm is composed of Thymio II robots. In addition, we compare three heuristics, of which one uses neuroevolution (evolution of neural networks) to show how self-organisation and embodied evolution can be used within the integration. Our use of embodiment in robotic controllers shows promising results and provide solid knowledge and guidelines for further investigations.