 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA low-cost wave-solar powered Unmanned Surface Vehicle
Dec 07, 2021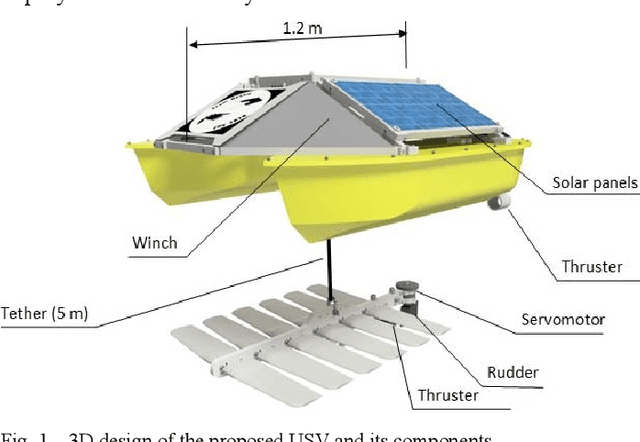


This paper presents a prototype of a low-cost Unmanned Surface Vehicle (USV) that is operated by wave and solar energy which can be used to minimize the cost of ocean data collection. The current prototype is a compact USV, with a length of 1.2m that can be deployed and recovered by two persons. The design includes an electrically operated winch that can be used to retract and lower the underwater unit. Several elements of the design make use of additive manufacturing and inexpensive materials. The vehicle can be controlled using radio frequency (RF) and a satellite communication, through a custom developed web application. Both the surface and underwater units were optimized with regard to drag, lift, weight, and price by using recommendation of previous research work and advanced materials. The USV could be used in water condition monitoring by measuring several parameters, such as dissolved oxygen, salinity, temperature, and pH.
Towards autonomous ocean observing systems using Miniature Underwater Gliders with UAV deployment and recovery capabilities
Feb 08, 2019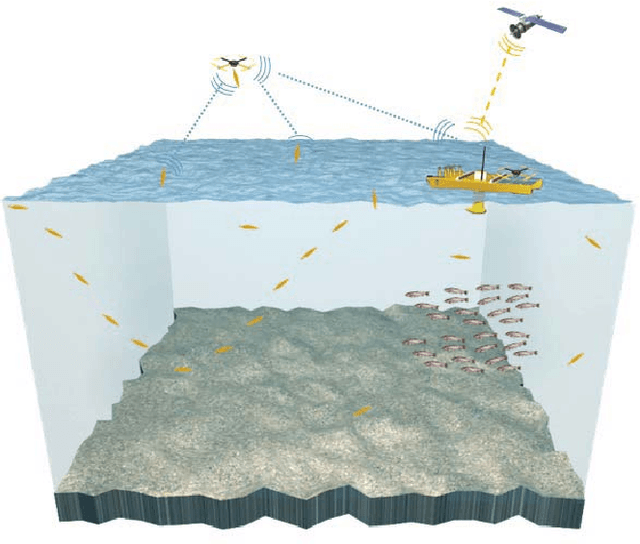

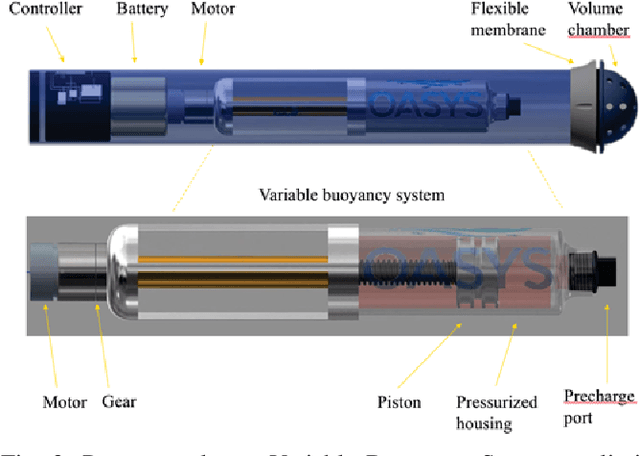
This paper presents preliminary results towards the development of an autonomous ocean observing system using Miniature Underwater Gliders (MUGs) that can operate with the support of Unmanned Aerial Vehicles (UAVs) and Unmanned Surface Vessels (USVs) for deployment, recovery, battery charging, and communication relay. The system reduces human intervention to the minimum, revolutionizing the affordability of a broad range of surveillance and data collection operations. The MUGs are equipped with a small Variable Buoyancy System (VBS) composed of a gas filled piston and a linear actuator powered by brushless DC motor and a rechargable lithium ion battery in an oil filled flexible enclosure. By using a fully pressure tolerant electronic design the aim is to reduce the total complexity, weight, and cost of the overall system. A first prototype of the VBS was built and demonstrated in a small aquarium. The electronic components were tested in a pressure testing facility to a minimum of 20bar. Preliminary results are promising and future work will focus on system and weight optimization, UAV deployment/recovery strategies, as well as sea trials to an operating depth of 200m.