 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
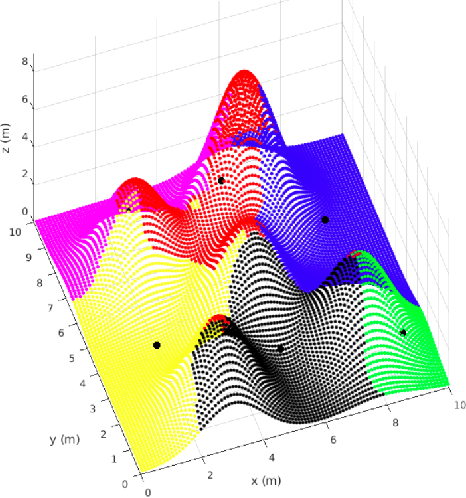
Add to EdgeVoronoi-based Multi-Robot Formations for 3D Source Seeking via Cooperative Gradient Estimation
Sep 09, 2024In this paper, we tackle the problem of localizing the source of a three-dimensional signal field with a team of mobile robots able to collect noisy measurements of its strength and share information with each other. The adopted strategy is to cooperatively compute a closed-form estimation of the gradient of the signal field that is then employed to steer the multi-robot system toward the source location. In order to guarantee an accurate and robust gradient estimation, the robots are placed on the surface of a sphere of fixed radius. More specifically, their positions correspond to the generators of a constrained Centroidal Voronoi partition on the spherical surface. We show that, by keeping these specific formations, both crucial geometric properties and a high level of field coverage are simultaneously achieved and that they allow estimating the gradient via simple analytic expressions. We finally provide simulation results to evaluate the performance of the proposed approach, considering both noise-free and noisy measurements. In particular, a comparative analysis shows how its higher robustness against faulty measurements outperforms an alternative state-of-the-art solution.
Predicting Future Occupancy Grids in Dynamic Environment with Spatio-Temporal Learning
May 06, 2022

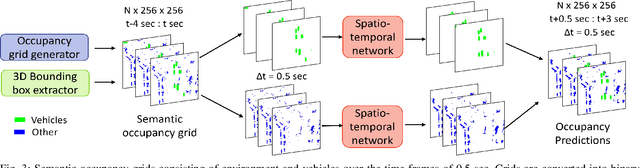
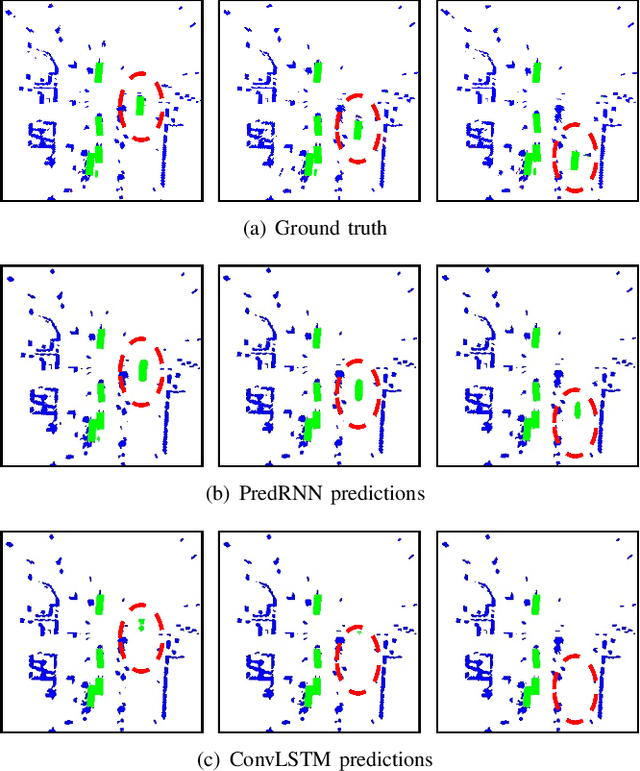
Reliably predicting future occupancy of highly dynamic urban environments is an important precursor for safe autonomous navigation. Common challenges in the prediction include forecasting the relative position of other vehicles, modelling the dynamics of vehicles subjected to different traffic conditions, and vanishing surrounding objects. To tackle these challenges, we propose a spatio-temporal prediction network pipeline that takes the past information from the environment and semantic labels separately for generating future occupancy predictions. Compared to the current SOTA, our approach predicts occupancy for a longer horizon of 3 seconds and in a relatively complex environment from the nuScenes dataset. Our experimental results demonstrate the ability of spatio-temporal networks to understand scene dynamics without the need for HD-Maps and explicit modeling dynamic objects. We publicly release our occupancy grid dataset based on nuScenes to support further research.
Multi-UAV Visual Coverage of Partially Known 3D Surfaces: Voronoi-based Initialization to Improve Local Optimizers
Jan 30, 2019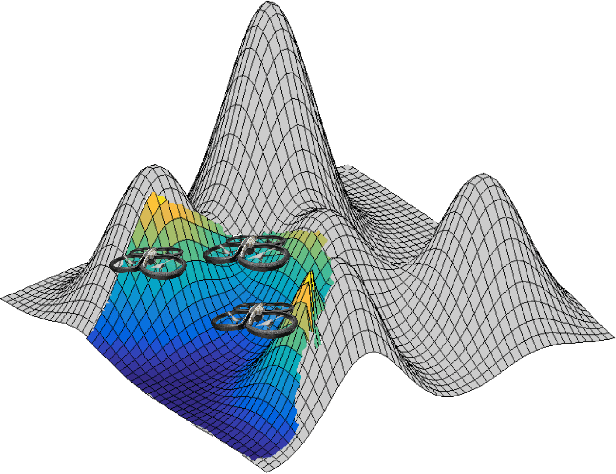

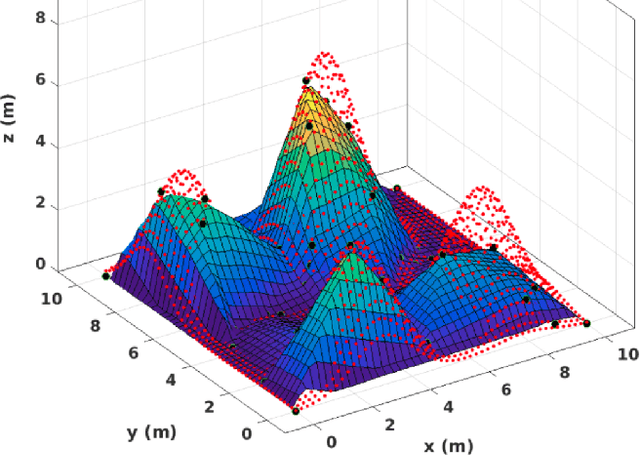
In this paper we study the problem of steering a team of Unmanned Aerial Vehicles (UAVs) toward a static configuration which maximizes the visibility of a 3D environment. The UAVs are assumed to be equipped with visual sensors constrained by a maximum sensing range and the prior knowledge on the environment is considered to be very sparse. To solve this problem on-line, derivative-free measurement-based optimization algorithms can be adopted, even though they are strongly limited by local optimality. To overcome this limitation, we propose to exploit the partial initial knowledge on the environment to find suitable initial configurations from which the agents start the local optimization. In particular, a constrained centroidal Voronoi tessellation on a coarse approximation of the surface to cover is proposed. The behavior of the agent is so based on a two-step optimization approach, where a stochastic optimization algorithm based on the on-line acquired information follows the geometrical-based initialization. The algorithm performance is evaluated in simulation and in particular the improvement on the solution brought by the Voronoi tessellation with respect to different initializations is analyzed.